AD采集、串口传输及上位机显示波形
本工程主要实现了AD7606采集到的数据经串口发送到上位机,并在上位机显示波形的功能
1.AD7606串口发送实现
1.1 ad7606驱动
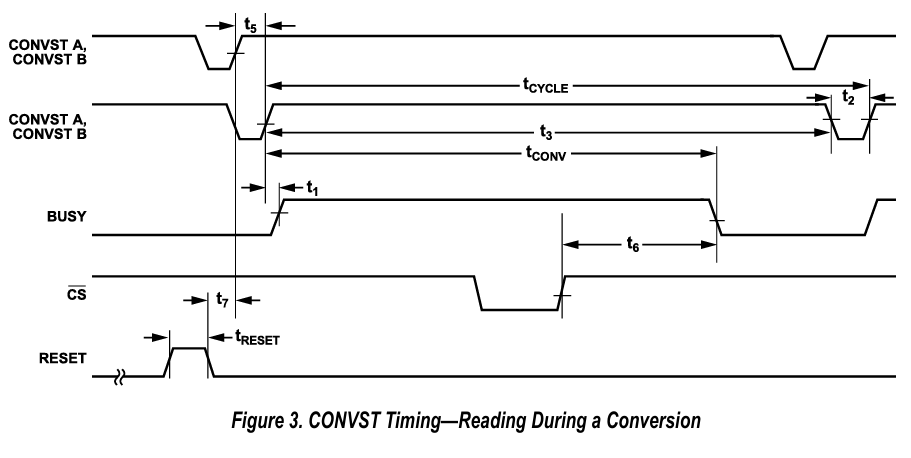
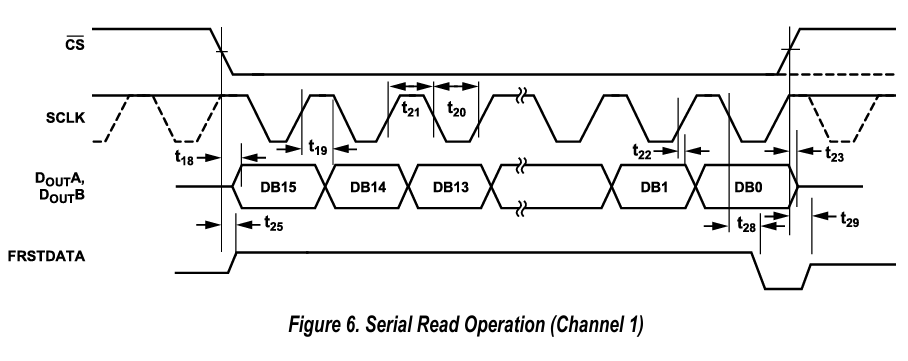
根据时序图来进行SPI通信:
转换时序图:
ADC SPI 时序:
驱动代码:
`timescale 1ns / 1ns
module uispi7606#(
parameter [9:0] SPI_DIV = 10'd5,
parameter [9:0] T5US_DIV = 10'd499
)
(
input ad_clk_i,
input ad_rst_i,
input ad_busy_i, //ad7606 忙标志位
output [2:0] ad_os_o, //ad7606 过采样倍率选择
output ad_cs_o, //ad7606 AD cs
output reg ad_sclk_o, //ad7606 AD data read
output ad_rst_o, //ad7606 AD reset
output ad_convsta_o, //ad7606 AD convert start
output ad_convstb_o, //ad7606 AD convert start
output ad_range_o,
input ad_out_a_i,
input ad_out_b_i,
output reg [63:0] ad_out_a,
output reg [63:0] ad_out_b,
output ad_cap_en
);
assign ad_range_o = 1'b1; //±10V真直流输入范围
assign ad_os_o = 3'b000; //无过采样
//ad复位时间高电平
reg [23: 0] rst_cnt;
assign ad_rst_o = !rst_cnt[23];
always@(posedge ad_clk_i)begin
if(ad_rst_i)
rst_cnt <= 8'd0;
else if(!rst_cnt[23])
rst_cnt <= rst_cnt + 1'b1;
end
//设置采样频率
reg [9:0] tcnt5us;
wire cycle_end = (tcnt5us == T5US_DIV);
always@ (posedge ad_clk_i)begin
if(ad_rst_o)
tcnt5us <= 10'd0;
else if(tcnt5us < T5US_DIV)
tcnt5us <= tcnt5us + 1'b1;
else
tcnt5us <= 10'd0;
end
parameter [9:0] SPI_DIV1 = SPI_DIV/2;
reg [9:0] clk_div = 10'd0;
always@(posedge ad_clk_i)begin
if(clk_div < SPI_DIV)
clk_div <= clk_div + 1'b1;
else
clk_div <= 10'd0;
end
//产生SPI时钟
wire clk_en1 = (clk_div == SPI_DIV1);//n
wire clk_en2 = (clk_div == SPI_DIV);//p
always@(posedge ad_clk_i)begin
if(clk_en2) ad_sclk_o <= 1'b1;
else if(clk_en1) ad_sclk_o <= 1'b0;
end
//AD转换状态机
reg [1:0] AD_S;
reg ad_convst;
assign ad_cs_o = ~((AD_S == 2'd3)&&ad_busy_i);
assign ad_convsta_o = ad_convst;
assign ad_convstb_o = ad_convst;
always @(posedge ad_clk_i)
begin
if(ad_rst_o||ad_rst_i)begin
ad_convst <= 1'b1;
AD_S <= 2'd0;
end
else begin
case(AD_S)
2'd0:if(clk_en2)begin
ad_convst <= 1'b0;
AD_S <= 2'd1;
end
2'd1:if(clk_en2)begin //延迟60ns,开始计时
ad_convst <= 1'b1;
AD_S <= 2'd2;
end
2'd2:if(clk_en2&&ad_busy_i)//延迟60ns,busy 肯定为高
AD_S <= 2'd3;
2'd3:if(cycle_end)//等待转换结束
AD_S <= 2'd0;
endcase
end
end
//SPI采样
reg [7 : 0] nbits;
wire ad_cap_en_r1 = (nbits==8'd64);
reg ad_cap_en_r2 = 1'b0;
assign ad_cap_en = ({ad_cap_en_r1,ad_cap_en_r2}==2'b10);
always@(posedge ad_clk_i) begin
ad_cap_en_r2 <= ad_cap_en_r1;
end
wire cap_en = (!ad_cs_o)&&clk_en1&&(nbits<8'd64);
//read spi adc data
always@(posedge ad_clk_i) begin
if(ad_rst_o) begin
ad_out_a <= 64'd0;
ad_out_b <= 64'd0;
nbits <= 8'd0;
end
else if(ad_cs_o)begin
nbits <= 8'd0;
end
else if(cap_en)begin//read data at sclk falling edge
nbits <= nbits + 1'b1;
ad_out_a <= {ad_out_a[62:0],ad_out_a_i};
ad_out_b <= {ad_out_b[62:0],ad_out_b_i};
end
end
endmodule
1.2 UART_tx驱动
module uart_byte_tx(
input clk,
input reset,//低电平复位
input [7:0]data,
input start,
output reg tx_out,
output reg tx_state //idle1、busy0
);
parameter fre_clk = 50_000_000; //时钟频率
parameter fre_baud = 9600; //波特率
parameter time_Mcnt = fre_clk/fre_baud - 1; //每位发送所需要的时间
parameter bit_Mcnt = 10 - 1; //每次需要发送的位数
reg [31:0]time_cnt;
reg [3:0]bit_cnt;
reg [9:0]tx_out_buffer;
localparam idle=1,
busy=0;
//位时间计数器
always@(posedge clk or negedge reset)begin
if(!reset)time_cnt<=0;
else if(tx_state==idle)time_cnt<=0;
else if(time_cnt == time_Mcnt)time_cnt<=0;
else time_cnt<=time_cnt+1'b1;
end
//位计数器
always@(posedge clk or negedge reset)begin
if(!reset)bit_cnt<=0;
else if(tx_state==idle) bit_cnt<=0;
else if(time_cnt == time_Mcnt)begin
if(bit_cnt == bit_Mcnt)bit_cnt<=0;
else bit_cnt<=bit_cnt+1'b1;
end
end
//状态切换
always@(posedge clk or negedge reset)begin
if(!reset)tx_state<=idle;
else begin
case(tx_state)
idle:begin
if(start)begin
tx_out_buffer<={1'b1,data,1'b0};
tx_state <=busy;
end
end
busy:begin
if((bit_cnt == bit_Mcnt)&&(time_cnt == time_Mcnt))
tx_state<=idle;
else tx_state<=busy;
end
default:tx_state<=idle;
endcase
end
end
always@(posedge clk or negedge reset)begin
if(!reset)tx_out<=1'b1;
else if(tx_state == idle)tx_out<=1'b1;
else
case(bit_cnt)
4'd0 :tx_out<=tx_out_buffer[0];
4'd1 :tx_out<=tx_out_buffer[1];
4'd2 :tx_out<=tx_out_buffer[2];
4'd3 :tx_out<=tx_out_buffer[3];
4'd4 :tx_out<=tx_out_buffer[4];
4'd5 :tx_out<=tx_out_buffer[5];
4'd6 :tx_out<=tx_out_buffer[6];
4'd7 :tx_out<=tx_out_buffer[7];
4'd8 :tx_out<=tx_out_buffer[8];
4'd9 :tx_out<=tx_out_buffer[9];
default :tx_out<=1'b1;
endcase
end
endmodule
1.3 功能实现代码
设置状态机,将16位AD采样数据打包为 0x55 高位数据 低位数据 0x55
状态转换为:等待发送使能信号->锁存AD数据->依次发送0x55 高位数据 低位数据 0xAA->等待发送使能信号
实现代码:
`timescale 1ns / 1ns
module ad7606_top
(
input sysclk_i,
input ad_busy_i, //ad7606 忙标志位
output [2:0] ad_os_o, //ad7606 过采样倍率选择
output ad_cs_o, //ad7606 AD cs
output ad_sclk_o, //ad7606 AD data read
output ad_rst_o, //ad7606 AD reset
output ad_convsta_o, //ad7606 AD convert start
output ad_convstb_o, //ad7606 AD convert start
output ad_range_o,
input ad_out_a_i,
input ad_out_b_i,
output card_en,
output o_tx_out
);
wire card_en = 1'b1;
wire ad_clk_i,ad_cap_en;
wire clk100M,locked;
assign ad_clk_i = clk100M;
assign ad_rst_i = !locked;
clk_wiz_0 clk_7606_inst(.clk_out1(clk100M),.locked(locked),.clk_in1(sysclk_i));
wire [63:0] ad_out_a,ad_out_b;
//---------------------------------------------------------------------------
uispi7606#(
.SPI_DIV(10'd5),
.T5US_DIV(10'd499)
)
uispi7606_inst
(
.ad_clk_i(ad_clk_i),
.ad_rst_i(ad_rst_i),
.ad_busy_i(ad_busy_i),
.ad_os_o(ad_os_o),
.ad_cs_o(ad_cs_o),
.ad_sclk_o(ad_sclk_o),
.ad_rst_o(ad_rst_o),
.ad_convsta_o(ad_convsta_o),
.ad_convstb_o(ad_convstb_o),
.ad_range_o(ad_range_o),
.ad_out_a_i(ad_out_a_i),
.ad_out_b_i(ad_out_b_i),
.ad_out_a(ad_out_a),
.ad_out_b(ad_out_b),
.ad_cap_en(ad_cap_en)
);
//----------------------------------------------------------------
reg [7:0]data;
reg start;
wire tx_out,tx_state;
assign o_tx_out=tx_out;
uart_byte_tx#(
.fre_clk(100_000_000), //时钟频率
.fre_baud(115200) //波特率
)uart_byte_tx_inst0(
.clk(clk100M),
.reset(locked), //低电平复位
.data(data),
.start(start),
.tx_out(tx_out),
.tx_state(tx_state) //idle1、busy0
);
//----------------------------------------------------------------
wire ad_tx_en,ad_cap_en_r1;
reg ad_cap_en_r2 = 1'b0;
assign ad_cap_en_r1 = ad_cap_en;
assign ad_tx_en = tx_state && ({ad_cap_en_r1,ad_cap_en_r2}==2'b10);
always@(posedge ad_clk_i) begin
ad_cap_en_r2 <= ad_cap_en_r1;
end
reg [2:0] ad_tx_state;
reg [7:0] ad_buffer_h;
reg [7:0] ad_buffer_l;
always@(posedge clk100M)begin
if(!locked)begin
ad_buffer_h <= 8'd0;
ad_buffer_l <= 8'd0;
ad_tx_state <= 3'd0;
start<=1'd0;end
else begin
case(ad_tx_state)
3'd0:begin
start<=1'd0;
if(ad_tx_en)begin
ad_buffer_h <= ad_out_a[63:56];
ad_buffer_l <= ad_out_a[55:48];
ad_tx_state<=3'd1;end
end
3'd1:if(tx_state)begin
data <= 8'h55;
start<=1'd1;
ad_tx_state<=3'd2;end
3'd2:begin start<=1'd0;
ad_tx_state<=3'd3;end
3'd3:if(tx_state)begin
data <= ad_buffer_h;
start<=1'd1;
ad_tx_state<=3'd4;end
3'd4:begin start<=1'd0;
ad_tx_state<=3'd5;end
3'd5:if(tx_state)begin
data <= ad_buffer_l;
start<=1'd1;
ad_tx_state<=3'd6;end
3'd6:begin start<=1'd0;
ad_tx_state<=3'd7;end
3'd7:if(tx_state)begin
data <= 8'hAA;
start<=1'd1;
ad_tx_state<=3'd0;end
default: ad_tx_state <= 3'd0;
endcase
end
end
endmodule
2.上位机串口显示程序
运行结果图: 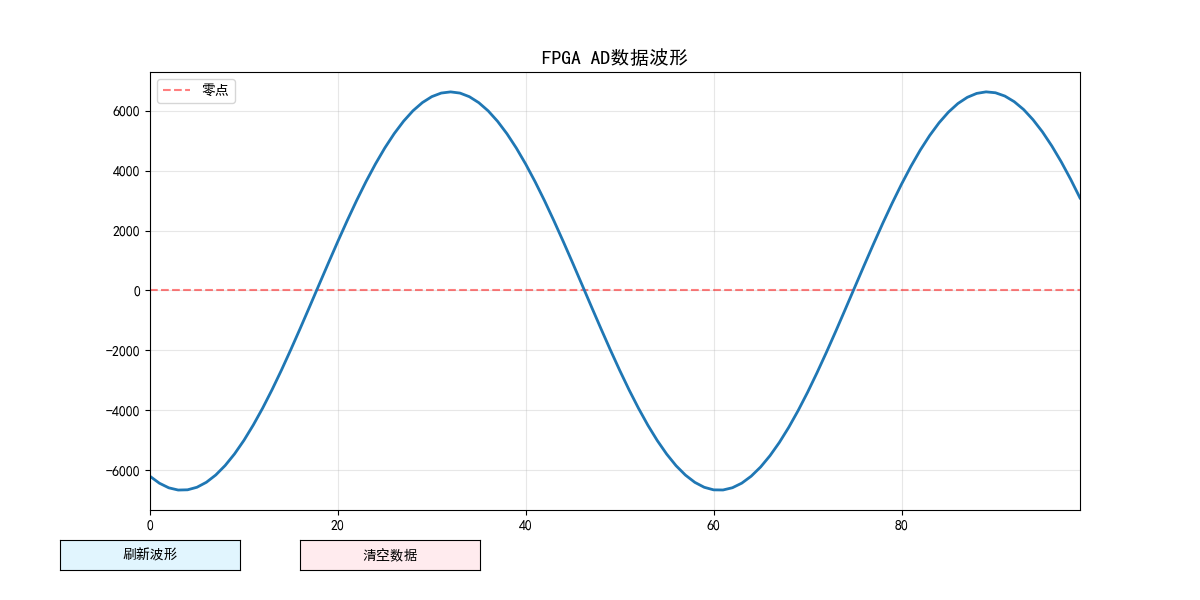 上位机程序:
上位机程序:
# cspell:disable # 禁用拼写检查(避免注释/变量名被误判为拼写错误)
import serial # 串口通信核心库
import serial.tools.list_ports # 串口辅助库:用于自动查找电脑上的可用串口
import matplotlib.pyplot as plt # 绘图核心库
import numpy as np # 数值计算库:快速处理数组
from matplotlib.widgets import Button # 绘图控件库:添加手动操作按钮
# -------------------------- 配置参数(根据实际情况修改)--------------------------
SERIAL_PORT = "COM11" # 串口号
BAUD_RATE = 115200 # 波特率
DISPLAY_POINTS = 100 # 波形显示的最大点数
FRAME_HEADER = 0x55 # 帧头
FRAME_TAIL = 0xAA # 帧尾
# --------------------------------------------------------------------------------
# 全局变量:存储接收的数据和串口对象
received_data = [] # 存储合并后的有符号16位数据
serial_obj = None # 串口对象
frame_buffer = [] # 帧缓冲(用于拼接完整帧)
line = None # 波形线条对象(全局存储,方便刷新)
ax = None # 坐标轴对象(全局存储,方便更新)
y_data = None # y轴数据数组(全局存储,避免重复创建)
def find_serial_port() -> str:
"""自动查找可用的串口(可选,用于快速定位串口号)"""
ports = list(serial.tools.list_ports.comports())
for port in ports:
if "USB" in port.description or "UART" in port.description:
print(f"自动检测到串口:{port.device}")
return port.device
return SERIAL_PORT # 未检测到则使用配置的串口号
def init_serial() -> bool:
"""初始化串口"""
global serial_obj
try:
serial_obj = serial.Serial(
port=find_serial_port(),
baudrate=BAUD_RATE,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
bytesize=serial.EIGHTBITS,
timeout=0.1
)
if serial_obj.is_open:
print(f"串口 {serial_obj.port} 打开成功!")
print("操作说明:")
print(" 1. 点击「刷新波形」按钮:手动更新当前最新数据")
print(" 2. 按下键盘「R」键:快速刷新波形(无需点击按钮)")
print(" 3. 点击「清空数据」按钮:重置波形和缓存数据")
print(" 4. 关闭窗口:自动关闭串口,退出程序")
return True
else:
print("串口打开失败!")
return False
except Exception as e:
print(f"串口初始化异常:{str(e)}")
return False
def parse_frame(raw_data: bytes):
"""解析串口数据,提取“55 xx yy AA”帧并合并为有符号16位整数"""
global frame_buffer, received_data
# 将新接收的数据加入缓冲
frame_buffer.extend(raw_data)
# 循环查找完整帧(不限定采集数量,持续解析)
while len(frame_buffer) >= 4:
if frame_buffer[0] == FRAME_HEADER:
if frame_buffer[3] == FRAME_TAIL:
high_byte = frame_buffer[1]
low_byte = frame_buffer[2]
# 有符号16位合并(高位在前)
combined_value = int.from_bytes(
bytes([high_byte, low_byte]),
byteorder='big',
signed=True
)
# 滚动存储:只保留最新的DISPLAY_POINTS个点
received_data.append(combined_value)
if len(received_data) > DISPLAY_POINTS:
received_data = received_data[-DISPLAY_POINTS:] # 移除最旧的数据
frame_buffer = frame_buffer[4:]
else:
print(f"帧错误:帧尾不是0xAA,丢弃字节 0x{frame_buffer[0]:02X}")
frame_buffer.pop(0)
else:
frame_buffer.pop(0)
def read_serial_data():
"""读取并解析串口数据(后台调用,仅解析不绘图)"""
global serial_obj
if serial_obj and serial_obj.is_open:
try:
# 批量读取串口缓冲数据
data_len = serial_obj.in_waiting
if data_len > 0:
raw_data = serial_obj.read(data_len)
parse_frame(raw_data)
except Exception as e:
print(f"读取串口数据异常:{str(e)}")
def manual_refresh_plot(event=None):
"""手动刷新波形图(核心函数,支持按钮和快捷键触发)"""
global received_data, line, ax, y_data
# 先读取最新的串口数据(确保刷新的是最新数据)
read_serial_data()
if len(received_data) > 0:
# 更新y轴数据(滚动存储,不足补0)
y_data[:len(received_data)] = received_data
if len(received_data) < DISPLAY_POINTS:
y_data[len(received_data):] = 0
# 更新波形线条
x_data = np.arange(DISPLAY_POINTS)
line.set_data(x_data, y_data)
# 自动适配y轴范围(留10%余量)
y_min = min(received_data) * 1.1 if received_data else -32768
y_max = max(received_data) * 1.1 if received_data else 32767
ax.set_ylim(y_min, y_max)
# 重绘图像(手动刷新关键步骤)
plt.draw()
plt.pause(0.01) # 暂停0.01秒,确保图像渲染完成
else:
print("暂无有效数据,刷新失败!")
def clear_data(event=None):
"""清空缓存数据和波形图"""
global received_data, frame_buffer, line, ax, y_data
# 清空全局缓存
received_data.clear()
frame_buffer.clear()
# 重置y轴数据为0
y_data = np.zeros(DISPLAY_POINTS)
line.set_data(np.arange(DISPLAY_POINTS), y_data)
# 重置y轴范围为默认极值
ax.set_ylim(-32768 * 1.1, 32767 * 1.1)
# 重绘图像
plt.draw()
plt.pause(0.01)
print("数据已清空!")
def key_press_event(event):
"""键盘快捷键监听:按下R键刷新,C键清空"""
if event.key == 'r' or event.key == 'R':
manual_refresh_plot()
elif event.key == 'c' or event.key == 'C':
clear_data()
def main():
global serial_obj, line, ax, y_data
# 初始化串口
if not init_serial():
return
# 初始化绘图(设置按钮区域,调整布局)
plt.rcParams['font.sans-serif'] = ['SimHei'] # 支持中文
plt.rcParams['axes.unicode_minus'] = False
fig, ax = plt.subplots(figsize=(12, 6))
# 预留底部空间放按钮(底部10%区域)
plt.subplots_adjust(bottom=0.15)
# 坐标轴设置
ax.set_title(f"FPGA AD数据波形", fontsize=14)
ax.grid(True, alpha=0.3)
ax.axhline(y=0, color='red', linestyle='--', alpha=0.5, label='零点')
ax.legend()
ax.set_xlim(0, DISPLAY_POINTS - 1) # x轴固定范围
ax.set_ylim(-32768 * 1.1, 32767 * 1.1) # 默认y轴范围
# 初始化x、y轴数据
x_data = np.arange(DISPLAY_POINTS)
y_data = np.zeros(DISPLAY_POINTS)
line, = ax.plot(x_data, y_data, color='#1f77b4', linewidth=2)
# -------------------------- 添加手动操作按钮 --------------------------
# 刷新按钮(位置:底部左5%,宽度15%,高度5%)
ax_refresh = plt.axes([0.05, 0.05, 0.15, 0.05])
btn_refresh = Button(ax_refresh, '刷新波形', color='#e1f5fe', hovercolor='#b3e5fc')
btn_refresh.on_clicked(manual_refresh_plot)
# 清空按钮(位置:底部左25%,宽度15%,高度5%)
ax_clear = plt.axes([0.25, 0.05, 0.15, 0.05])
btn_clear = Button(ax_clear, '清空数据', color='#ffebee', hovercolor='#ffcdd2')
btn_clear.on_clicked(clear_data)
# ------------------------------------------------------------------------
# 绑定键盘快捷键
fig.canvas.mpl_connect('key_press_event', key_press_event)
# 显示波形(阻塞窗口,直到关闭)
try:
plt.show()
finally:
# 关闭窗口时关闭串口
if serial_obj and serial_obj.is_open:
serial_obj.close()
print("串口已关闭,程序退出!")
if __name__ == "__main__":
main()
本文章使用limfx的vscode插件快速发布