均匀弦动力学涉猎
1 绪论
弦振动是生活中常见的实际问题,均匀弦是其中比简单一种情况。本文将研究均匀弦自由振动的动力学方程,求解方程并引出振型模态和振动广义自由度的概念。推出弦振动的广义运动方程,进而推广到均匀弦非自由振动的情况。
本文涉及到的知识有,但不限于:理论力学、材料力学、高等数学、线性代数。
注:书中所列的公式博主都尽量推了一遍。然而由于数学功底不足,对于书中一少部分简略了的公式步骤任然没能推出。它们后面均以“(?)”标注。请读者讨论。
2 模型建立与化简
2.1 模型建立
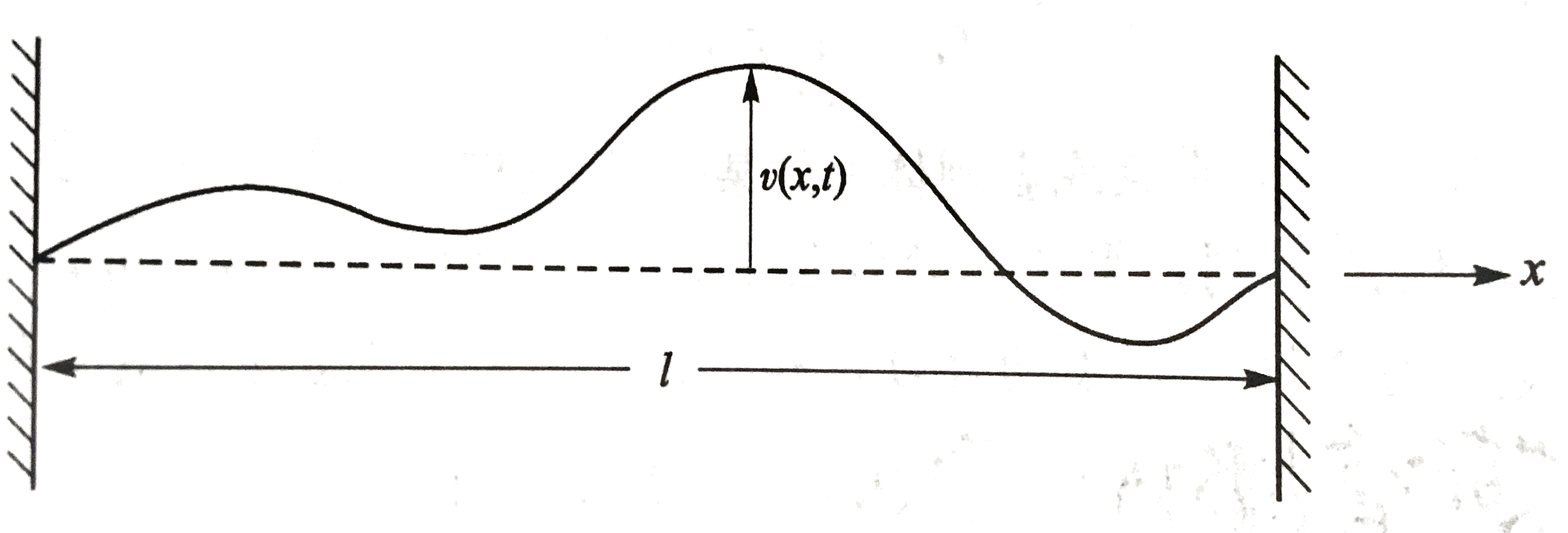
如图所示,一个初始长为l0的弦在x方向被拉伸,固定于两墙之间,墙的距离为l,大于l0。x处t时刻,横向位移表示为v(x,t),纵向位移表示为u(x,t)。
取出一段微元,如图所示:
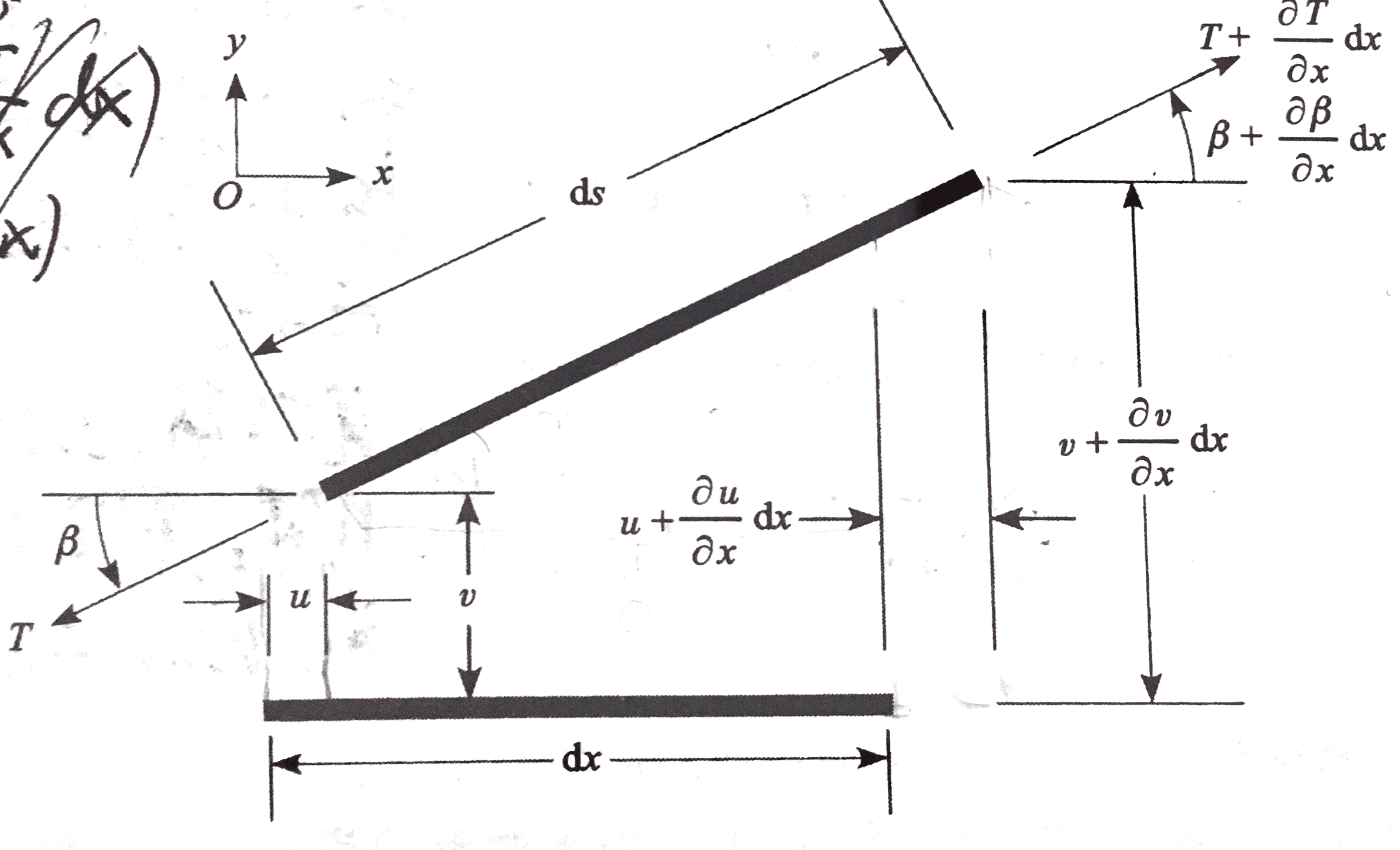
微元忽略二阶以上的级数。此微元质量为mdx,其中m为线密度。T为左侧弦拉力。β为左侧弦切线与x轴夹角。
由质心运动定理,并投影到x和y方向得:
∑Fx=mdxacx,∑Fy=mdxacy(2.1.1)
其中:
∑Fx=(T+∂x∂Tdx)cos(β+∂x∂βdx)−Tcosβ
由于弦为微振动:
cos(β+∂x∂βdx)≈cosβ
则:
∑Fx=∂x∂Tdxcosβ
另外:
∂x∂(Tcosβ)=∂x∂Tcosβ−sinβ∂x∂βT≈∂x∂Tcosβ(其中sinβ≈0)
于是:
∑Fx=∂x∂(Tcosβ)dx(2.1.2)
另一方面:
uc=2u+(u+∂x∂udx)=u+21∂x∂udx≈u
故:
acx=∂t2∂2u(2.1.3)
将(2.1.2),(2.1.3)代入(2.1.1)的前一式中:
∂x∂(Tcosβ)=m∂t2∂2u(2.1.4)
同理,对于(2.1.1)的后一式有类似的推导:
∂x∂(Tsinβ)=m∂t2∂2v(?)(2.1.5)
设应变为ϵ,由图可看出ϵ=dxds−dx,即ds=(1+ϵ)dx。
如图中的几何关系:
sinβ=ds(v+∂x∂vdx)−v=1+ϵ1∂x∂v(2.1.6)
cosβ=dsdx−u+u+∂x∂udx=1+ϵ1(1+∂x∂u)(2.1.7)
因为cos2β+sin2β=1,则
ϵ=(1+∂x∂u)2+(∂x∂v)2−1(2.1.8)
设EA为弦的纵向刚度,由材料力学可知:
T=EAϵ(2.1.9)
同时补充边界条件,即弦两端位移恒为零:
v(0,t)=v(l,t)=0(2.1.10)
至此,从(2.1.4)到(2.1.10)为弦自由振动系统的数学模型。
2.2 模型化简
假设弦变形存在一个静平衡解,该解的所有函数与时间t无关,即:
u(x,t)=u(x)v(x,t)=0β(x,t)=0ϵ(x,t)=ϵ(x)T(x,t)=T(x)⎭⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎫
将上面方程代入(2.1.4)、(2.1.5),且由边界条件u(0)=0得:
T(x)=T0ϵ(x)=ϵ0=EAT0=ll−l0u(x)=ϵ0x⎭⎪⎬⎪⎫
静平衡方程中T0相当大,则振动变形较小,可看成摄动量,因此可假设:
u(x,t)=ϵ0x+u(x,t)v(x,t)=v(x,t)β(x,t)=β(x,t)ϵ(x,t)=ϵ0+ϵ(x,t)T(x,t)=T0+T(x,t)⎭⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎫(2.2.1)
另外,由于变形较小,β=sinβ,参照(2.1.6):
β=1+ϵ01∂x∂v(2.2.2)
将(2.2.1)和(2.2.2)代入(2.1.4)和(2.1.5)中,忽略所有摄动量平方项和相乘项,得:
EA∂x2∂2u=m∂t2∂2u(?)1+ϵ0T0∂x2∂2v=m∂t2∂2v}(2.2.3)
由于EA≫T0所以纵向幅值非常小,不是我们感兴趣的。结合(2.1.9)可以看出ϵ0≪1,因此上方程组第二项可写成:
T0∂x2∂2v=m∂t2∂2v
去掉摄动量上标,得:
T∂x2∂2v=m∂t2∂2v(2.2.4)
这就是简化后的弦自由振动方程。
3 方程求解与振型模态的概念
3.1 方程的通解
对于弦自由振动方程(2.2.4),可以构造出解的形式,进而分离变量。
令:
v(x,t)=X(x)Y(t)(3.1.1)
代入(2.2.4),整理得:
mX(x)TX′′(x)=Y(t)Y¨(t)
上式中,因为方程两边各自为不同的独立变量的函数,方程成立的唯一方式是两边都等于同一个常数,令这个常数为−ω2。则有:
TX′′(x)+mω2X(x)=0Y¨(t)+ω2Y(t)=0}
令:
α2=Tmω2(3.1.2)
则:
X′′(x)+α2X(x)=0Y¨(t)+ω2Y(t)=0}
于是可解出以上两个方程的通解:
X(x)=Asin(αx)+Bcos(αx)Y(t)=Csin(ωt)+Dcos(ωt)}(3.1.3)
其中:
ω=αmT(3.1.4)
且α=0。
则v(x,t)的通解为所有XY的线性组合。
3.2 振型模态
由边界条件(2.1.10)得:
X(0)Y(t)=0X(l)Y(t)=0}
结合(3.1.3)得:
B=0Asin(αl)=0}
对上式第二式:当A=0时,位移恒为零,即静平衡状态。但我们求的是振动情况,所以A=0,于是:
α=αi=liπ(i=1,2,⋯)
因此,对于i的每个整数值,存在一个特征值αi和一个与Xi关联的解,称为“特征函数”,它构成基于相应Yi的通解,则解可写成:
v(x,t)=i=1∑∞vi(x,t)=i=1∑∞sin(liπx)[Eisin(ωit)+Ficos(ωit)](3.2.1)
其中:
ωi=liπmT
观察(3.2.1)可以看出,对于任意给定的瞬时,横向变形由无穷个位置函数(是位置x的函数)乘上各自对应的时间函数之和。而且每个位置函数和时间函数关联于各自特征函数。这里的位置函数称为“模态振型”。 用ϕi(x)表示。对于弦的振动:
ϕi(x)=sin(liπx)(3.2.2)
另外,令:
ξi(x)=Eisin(ωit)+Ficos(ωit)(3.2.3)
则,弦振动函数可以表示为:
v(x,t)=i=1∑∞ϕi(x)ξi(t)(3.2.4)
3.3 模态振型的正交性的证明
所谓正交性即是说,一个函数序列和一个固定积分区间中,所有两个不同函数之积在固定区间的积分为零。
对于均匀弦,模态振型ϕi(x)在(0,l)上满足正交性。即:
∫0lϕi(x)ϕj(x)dx{=0=0(i=j)(i=j)
而对于非均匀弦,m(x)为弦的线密度函数。则有类似的形式:
∫0lm(x)ϕi(x)ϕj(x)dx{=0=0(i=j)(i=j)
下面证明此式:
假设vi(x,t)=ϕi(x)ξi(x)为振动方程的一组特解。代入(2.2.4)得:
Tϕi′′(x)ξi(t)=m(x)ϕi(x)ξi¨(t)
由于ξi(x)为简谐函数,有:
ξi¨(t)=−ω2ξi(t)
于是方程变为:
Tϕi′′(x)=−m(x)ϕi(x)ωi2(3.3.1)
同理,对于另一个特解vj(x,t)=ϕj(x)ξj(x),有:
Tϕj′′(x)=−m(x)ϕj(x)ωj2(3.3.2)
(3.3.1)乘以ϕj,(3.3.2)乘以ϕi。相减并在(0,l)上积分得:
(ωi2−ωj2)∫0lm(x)ϕi(x)ϕj(x)dx=T∫0l[ϕi(x)ϕj′′(x)−ϕi′′(x)ϕj(x)]dx
右边可利用分部积分,上式可化为:
(ωi2−ωj2)∫0lm(x)ϕi(x)ϕj(x)dx=T(ϕiϕj′−ϕi′ϕj)∣0l−T∫0l(ϕi′ϕj′−ϕi′ϕj′)dx=0
当i=j时,ωi=ωj,则有:
∫0lm(x)ϕi(x)ϕj(x)dx=0(3.3.3)
上式表明两段固定的弦的模态振型构成正交集合。
当i=j时,令积分等于Mi,即:
∫0lm(x)ϕi2(x)dx=Mi(3.3.4)
称为第i阶模态的广义质量。
特殊的,对于均匀弦
∫0lϕi(x)ϕj(x)dx=0,Mi=2ml(3.3.5)
3.4 模态振型正交性的使用
设均匀弦振动有一初始条件,即初始形状变形和初始速度:
v(x,0)=f(x)∂t∂v(x,0)=g(x)}
代入(3.2.1)得:
∑i=1∞Fisin(liπx)=f(x)∑i=1∞lEiiπmTsin(liπx)=g(x)}
两式分别乘以sin(jπx/l)dx,并沿弦长积分得:
∫0lf(x)sin(ljπx)dx=∑i=1∞Fi∫0lsin(liπx)sin(ljπx)dx∫0lg(x)sin(ljπx)dx=∑i=1∞lEiiπmT∫0lsin(liπx)sin(ljπx)dx}
利用正交性,即(3.3.5)得:
∫0lf(x)sin(ljπx)dx=Fj∫0lsin2(ljπx)dx=2Fjl∫0lg(x)sin(ljπx)dx=lEiiπmT∫0lsin2(ljπx)dx=2EjjπmT}
解出未知常数得:
Ei=iπ2Tm∫0lg(x)sin(liπx)dxFi=l2∫0lf(x)sin(liπx)dx}(3.4.1)
得此初始条件下,弦的振动函数:
v(x,t)=i=1∑∞sin(liπx)[Eisin(ωit)+Ficos(ωit)](3.4.2)
4 弦振动的另一种解释——行波
弦的振动也可以看成波的传递,下面推导其数学模型。
假设弦振动的初始条件为,具有初始位移,但初始速度为零。即:
v(x,0)=f(x)∂t∂v(x,0)=g(x)=0
结合(3.4.1)和(3.4.2)得:
v(x,t)=i=0∑∞sin(liπx)Ficos(mTliπt)(4.1)
Fi=l2∫0lf(x)sin(liπx)dx(4.2)
且
v(x,0)=f(x)=i=0∑∞Fisin(liπx)(4.3)
由三角函数积化和差公式:
sinαcosβ=21[sin(α+β)+sin(α−β)]
(4.1)可写成:
v(x,t)=21i=1∑∞Fi{sin[liπ(x+mTt)]+sin[liπ(x−mTt)]}
代入(4.3)得:
v(x,t)=21[f(x+mTt)+f(x−mTt)](4.4)
这就是行波的数学模型。
对于以上方程可以做如下解释:
令
xL(x,t)≡x+mTtxR(x,t)≡x−mTt⎭⎪⎬⎪⎫
函数变为:
v(x,t)=21[f(xL)+f(xR)]
对比(4.3),方程可看为两个波形相叠加后取一半,这两个波形会随时间移动。一个向x正方向移动,一个向x负方向移动。
令:
V=mT
则,(4.4)可写为:
v(x,t)=21[f(x+Vt)+f(x−Vt)]
V称为传播速度。
由f(x)的表达式(4.3)可以看出:
f(x)为奇函数,即f(−x)=−f(x)。换句话说,波在墙面x=0处具有反射性。
f(x)是关于x的周期为2l的周期函数,即f(x)=f(x+2nl)(n=0,±1,±2,⋯)。结合1可以得出:f(x+l)=f(x−l)=−f(l−x)。换句话说,波在墙面x=l具有反射性。
注意到物理模型要求f(x)的定义域为(0,l)。利用上面两条性质可以扩充定义域,让f(x±Vt)对于任意t有定义。即:
当
nl≤x+Vt≤(n+1)l(n=0,±1,±2,⋯)
时
f(x±Vt)=(−1)nf{(−1)n[x±Vt+2(−1)n−2n−1l]}(?)
下面举一实例:
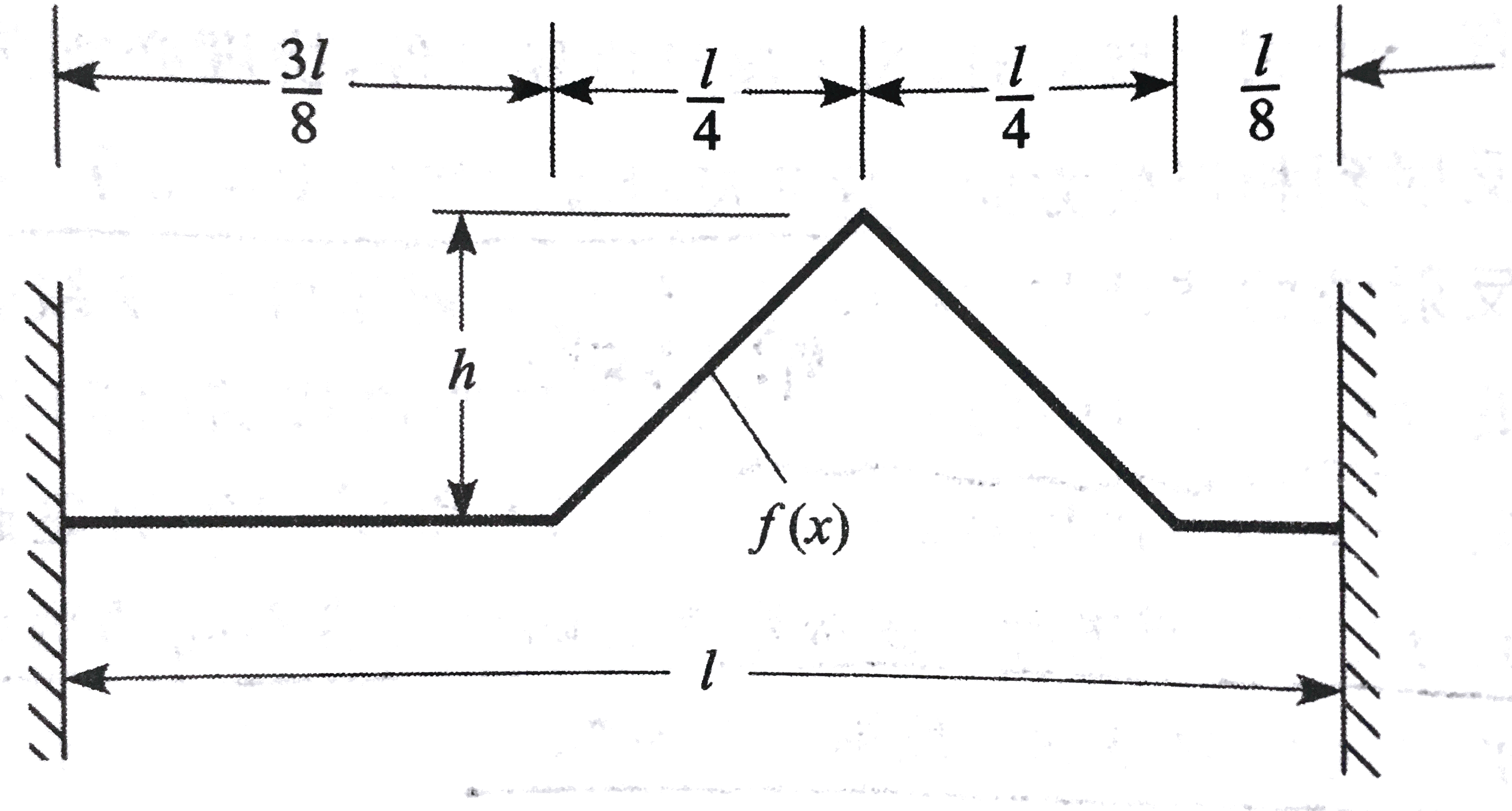
如图所示为弦初始时刻波形图
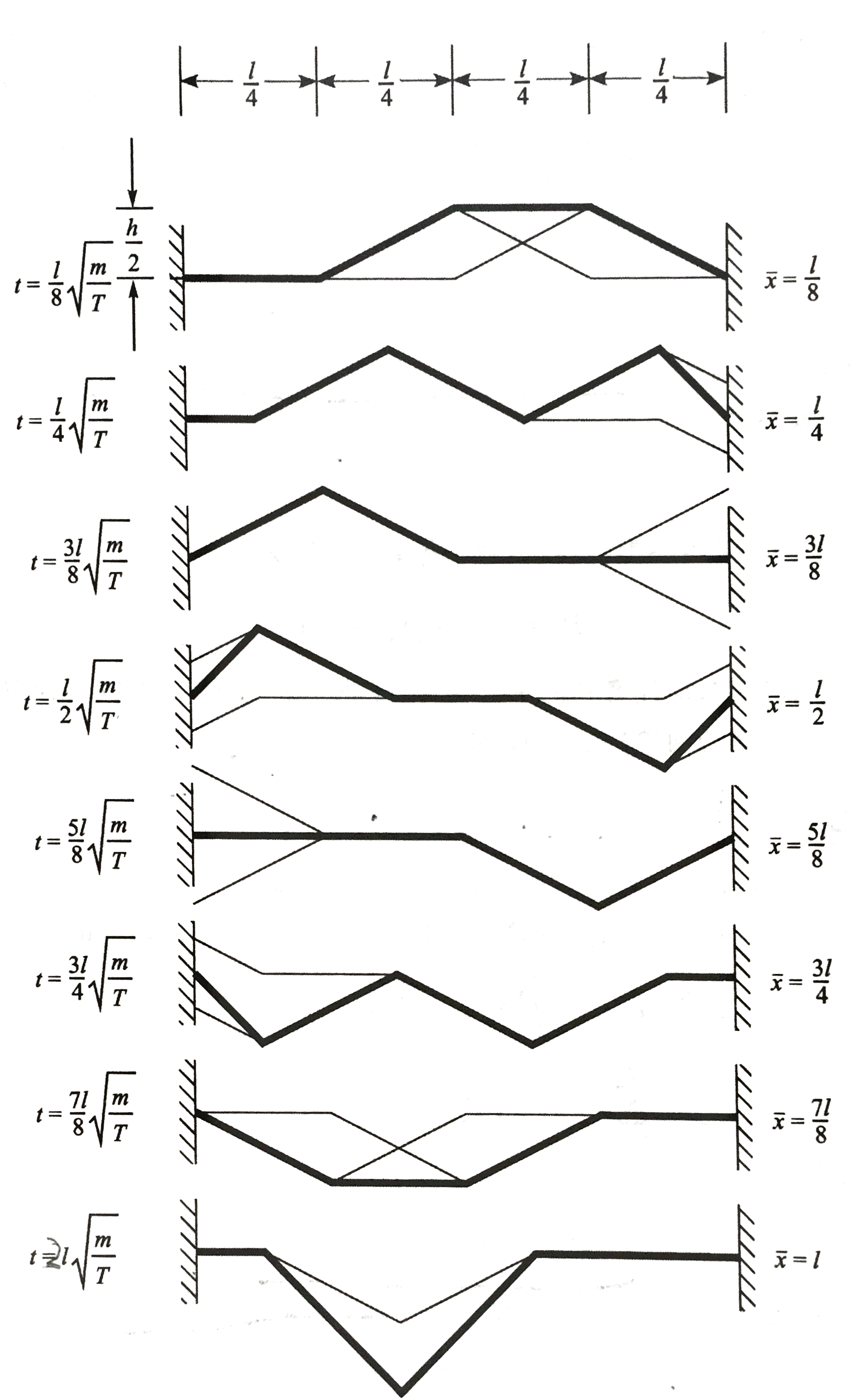
在t时刻两个波位移的绝对值用x表示。如图所示,细线表示两个波的各自位置,粗线表示弦振动行波情况(由两个波合成)。
可以看出波形经过2lm/T后恢复形状。
5 广义运动方程
前面的推导都是弦的自由振动,而实际情况下也有弦受外力的情况下振动,即非自由振动。而非自由振动则需要用广义运动方程求解。
5.1 广义坐标
观察(3.2.2)、(3.2.3)、(3.2.4):
ϕi(x)=sin(liπx)(3.2.2)
ξi(x)=Eisin(ωit)+Ficos(ωit)(3.2.3)
v(x,t)=i=1∑∞ϕi(x)ξi(t)(3.2.4)
(3.2.4)可写为:
v(x,t)=ϕ1(x)ξ1(t)+ϕ2(x)ξ2(t)+ϕ3(x)ξ3(t)+⋯
写成向量的形式:
v(x,t)=(ϕ1(x)ϕ2(x)ϕ3(x)⋯)⎝⎜⎜⎜⎜⎛ξ1(x)ξ2(x)ξ3(x)⋮⎠⎟⎟⎟⎟⎞
于是等号右边第二个向量可以看作第一个向量坐标系下的坐标值,即第一个向量代表广义坐标系,第二个向量代表广义坐标。
另外,由3.2节、3.3节、3.4节可以看出,ϕi(x)与初始条件无关,ξi(x)与初始条件有关。
所以对于弦自由振动问题,一旦其边界条件确定,广义坐标系ϕi(x)就随之确定。只需要通过初始条件确定广义坐标ξi(x)即可。
而对于非自由振动,其运动函数也可以看出广义坐标系和广义坐标的乘积。(书中没有证明)
5.2 广义运动方程
拉格朗日方程是动力学中普遍适用的方程:
dtd(∂ξ˙i∂L)−∂ξi∂L=Ξi(i=1,2,3,⋯)
其中,L=K−P为拉格朗日量,即系统总动能K和总势能P之间的差。ξi为广义坐标。Ξi为广义力,代表所有非保守力以及没有计入总势能的保守力的作用。
5.2.1 弦的势能
不考虑重力影响,弦的势能考虑为等于其应变能:
P=21∫0l0EAϵ2dx(5.2.1.1)
由2.1节可知:
ϵ=(1+∂x∂u)2+(∂x∂v)2−1(2.1.8)
将振动量看成摄动量,由2.2节可知:
u(x,t)=ϵ0x+u(x,t)v(x,t)=v(x,t)β(x,t)=β(x,t)ϵ(x,t)=ϵ0+ϵ(x,t)T(x,t)=T0+T(x,t)⎭⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎫(2.2.1)
EA为常值,故(5.2.1)可化为:
P=2EA∫0l0(ϵ02+2ϵϵ+ϵ2)dx(5.2.1.2)
由于T0=EAϵ0。且积分中第一项为常量,可以忽略。(代入拉格朗日方程中,常量不影响方程成立)上式可化为:
P=T0∫0l0ϵdx+2EA∫0l0ϵ2dx
由(2.1.8)和(2.2.1)得:
ϵ=∂x∂u+2(1+ϵ0)1(∂x∂v)2+⋯(?)
代入(5.2.2)中省略∂x∂u和∂x∂v的三次及以上项:
P=T0∫0l0∂x∂udx+2(1+ϵ0)T0∫0l0(∂x∂v)2dx+2EA∫0l0(∂x∂u)2dx
由边界条件得u(0,t)=u(l,t)=0,则第一项为零。
由于纵向位移得摄动与横向位移摄动是解耦的,且纵向振动频率非常高,则第三项可以去掉。
又ϵ0≪1。再去掉摄动上标:
P=2T0∫0l0(∂x∂v)2dx
代入(3.2.4)得:
P=2T0∫0l(i=1∑∞ϕi′ξi)2dx
上式中具有求和的平方,可以写作双重求和的形式,如下面的证明:
(i=1∑3ai)2=(a1+a2+a3)2=a12+a22+a32+2a1a2+2a2a3+2a3a1=a1(a1+a2+a3)+a2(a1+a2+a3)+a3(a1+a2+a3)=a1i=1∑3ai+a2i=1∑3ai+a3i=1∑3ai=j=1∑3aji=1∑3ai=j=1∑3i=1∑3aiaj
于是势能可写为:
P=2Ti=1∑∞j=1∑∞ξiξj∫0lϕi′ϕj′dx
对于弦,振型和它们的一阶导数是正弦函数;因此,它们构成正交集合,即:
∫0lϕi′(x)ϕj′(x)dx=0(i=j)
则势能化简为:
P=2Ti=1∑∞ξi2∫0lϕi′2dx
利用分部积分:
∫0lϕi′ϕi′dx=ϕi′ϕi∣0l−∫0lϕiϕi′′dx
由边界条件得:ϕi(0)=ϕi(l)=ϕi′(0)=ϕi′(l),于是:
P=21i=1∑∞ξi2∫0l−ϕiTϕi′′dx
代入(3.3.1):
P=21i=1∑∞ξi2∫0lm(x)ωiϕi2dx
结合(3.3.4)得:
P=21i=1∑∞Miωi2ξi2(5.2.1.3)
这就是弦的势能。
5.2.2 弦的动能
对于弦振动,其纵向位移u没有横向位移v显著,当为小扰动的时,在平衡状态点将它解耦,则动能可表示为:
K=21∫0l0m(∂t∂v)2dx
代入(3.2.4)得:
K=21∫0lm(i=1∑∞ϕiξ˙)2dx
和势能类似,求和平方简化为双重求和:
K=21∫0li=1∑∞j=1∑∞ϕiξ˙iϕjξ˙jm(x)dx=21i=1∑∞j=1∑∞ξ˙iξ˙j∫0lm(x)ϕiϕjdx
利用正交性,即结合(3.3.3)、(3.3.4)得:
K=21i=1∑∞Miξ˙i2(5.2.2.1)
这就是弦得动能。
5.2.3 弦的广义力
设弦上有分布载荷f(x,t),则其虚功为:
δW=∫0l0f(x,t)δv(x,t)dx
其中虚位移δv(x,t)可写作广义坐标的形式:
δv(x,t)=i=1∑∞ϕi(x)δξi(t)
于是虚功表达式为:
δW=∫0l0i=1∑∞f(x,t)ϕi(x)δξi(t)dx=i=1∑∞δξi(t)∫0l0f(x,t)ϕi(x)dx
广义力和真实力按照虚功原理等效:
i=1∑∞δξi(t)Ξi(t)=δW
于是,广义力为:
Ξi(t)=∫0l0f(x,t)ϕi(x)dx(5.2.3.1)
如果弦上x=xc处加载了集中力Fc(t),则引入狄拉克函数δ(x−xc)即可。(注意:狄拉克函数的δ是函数符号与虚位移无关。 此外,有关狄拉克函数的详细介绍可以看这里。)这时,其等效分布载荷为:
f(x,t)=Fc(t)δ(x−xc)
代入广义力公式:
Ξi(t)=∫0l0Fc(t)δ(x−xc)ϕi(x)dx=Fc(t)∫0l0δ(x−xc)ϕi(x)dx=fc(t)ϕi(xc)=Fc(t)sin(liπxc)(5.2.3.2)
其中:
5.2.4 广义运动方程的推导
注意到广义动能(5.2.2.1)仅为广义坐标变化率的函数,广义势能(5.2.1.3)仅为广义坐标的函数。所以拉格朗日方程可写作:
dtd(∂ξ˙i∂K)+∂ξi∂P=Ξi
代入广义动能(5.2.2.1)、广义势能(5.2.1.3)得:
Mi(ξ¨i+ωi2ξi)=Ξi(5.2.4.1)
这就是广义运动方程。该方程也适用于非自由振动。(书中没有证明)
5.3 广义运动方程求解实例
如图所示,幅值为F0的集中阶跃函数的力作用在弦的中点处。
阶跃函数的定义为:
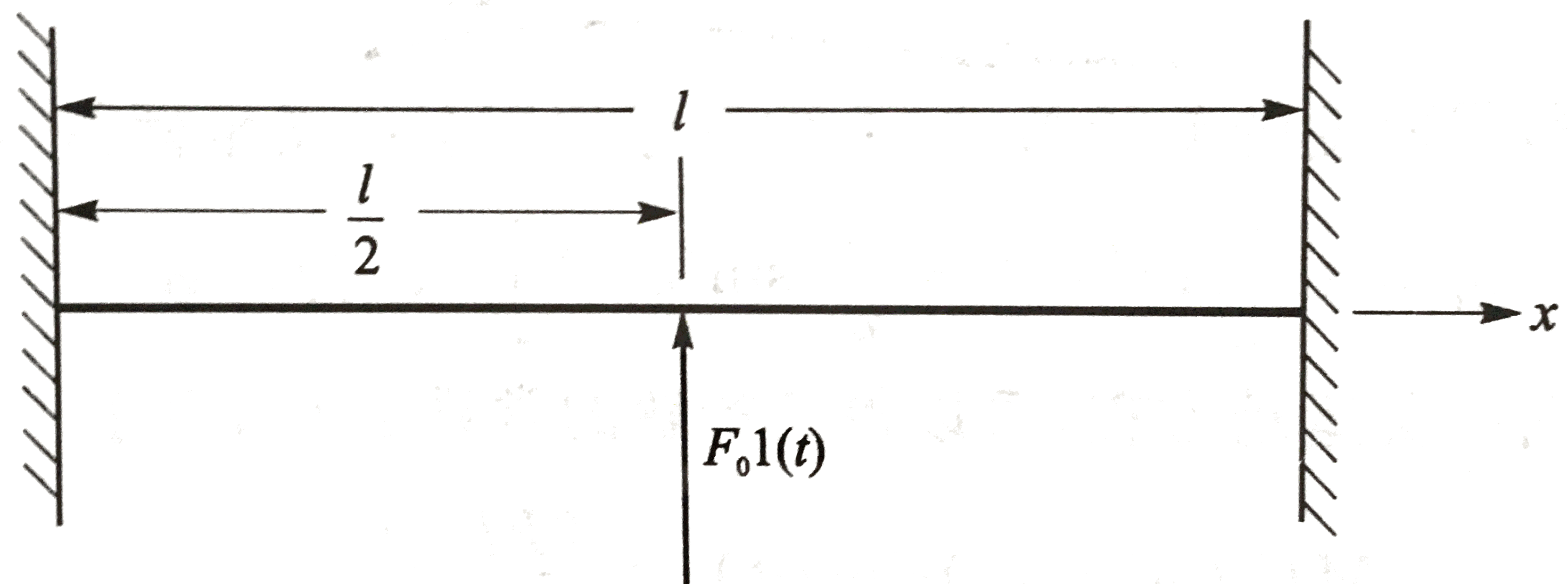
1(t)={01(t<0)(t⩽0)
弦的初始振型为:
v(x,0)=hsin(l4πx)
且初始速度为零。
求其响应。
解:
广义力:
Ξi=∫0lF01(t)δ(x−2l)ϕi(x)dx=F01(t)ϕi(2l)=F01(t)sin(2iπ)
其中
sin(2iπ)={0(−1)2i−1(i为偶数)(i为奇数)
代入广义运动方程(5.2.4.1):
Mi(ξ¨i+ωi2ξi)={0F01(t)(−1)2i−1(i为偶数)(i为奇数)
其通解为:
ξi={Aisin(ωit)+Bicos(ωit)Aisin(ωit)+Bicos(ωit)+Ci(i为偶数)(i为奇数)(5.3.1)
其中:
ωi=liπmT
下面处理初始条件:
弦具有初始振型:
v(x,0)=i=1∑∞ξi(0)ϕi(x)=i=2,4,⋯∑∞Bisin(liπx)+i=1,3,⋯∑∞(Bi+Ci)sin(liπx)=hsin(l4πx)
将等式乘以sin(jπx/l)dx,并沿弦长积分得:
h∫0lsin(l4πx)sin(ljπx)dx=i=2,4,⋯∑∞Bi∫0lsin(liπx)sin(ljπx)dx+i=1,3,⋯∑∞(Bi+Ci)∫0lsin(liπx)sin(ljπx)dx
利用正弦函数得正交性得:
B4=hBi=0Bi=−Ci(i为偶数,且i=4)(i为奇数)⎭⎪⎬⎪⎫(5.3.2)
另外,初始速度为零:
∂t∂v(x,0)=i=1∑∞ξ˙i(0)ϕi(x)=i=1∑∞ωiAisin(liπx)=0
将上式乘以sin(jπx/l)dx并沿弦长积分。同样利用正弦函数的正交性得:
Ai=0(5.3.3)
将(5.3.2)和(5.3.3)代入(5.3.1)得:
ξi=⎩⎪⎪⎨⎪⎪⎧0hcos(ωit)Ci(i为偶数,且i=0)(i=4)(i为奇数)
将ξi=Ci(i为奇数)代入广义运动方程(5.2.4.1):
MiCiωi2=F0(−1)2i−1
对于均匀弦代入(3.3.5)第二式得:
Ci=T(iπ)22lF0(−1)2i−1
则广义运动方程的解可以写成:
ξi=⎩⎪⎪⎪⎨⎪⎪⎪⎧0hcos(ωit)T(iπ)22lF0(−1)2i−1(i为偶数,且i=0)(i=4)(i为奇数)
代入到弦振动函数(3.2.4),得到响应:
v(x,t)=hcos(ω4t)sin(l4πx)+Tπ22lF0i=1,3,⋯∑∞i2(−1)2i−1[1−cos(ωit)]sin(liπx)ωi=liπmT
解答完毕。
6 总结
均匀弦的振动是最简单的弹性体振动模型,可利用此模型框架建立出均匀梁扭转弯曲的动力学模型。
本文章使用limfx的vsocde插件快速发布