智能网联汽车赛项培训-第一次(11.21)视频
时间轴
4'30 致辞
12'30 讲报名流程、规则(可跳过
28'30 知识结构建议 南京理工大学-马勇
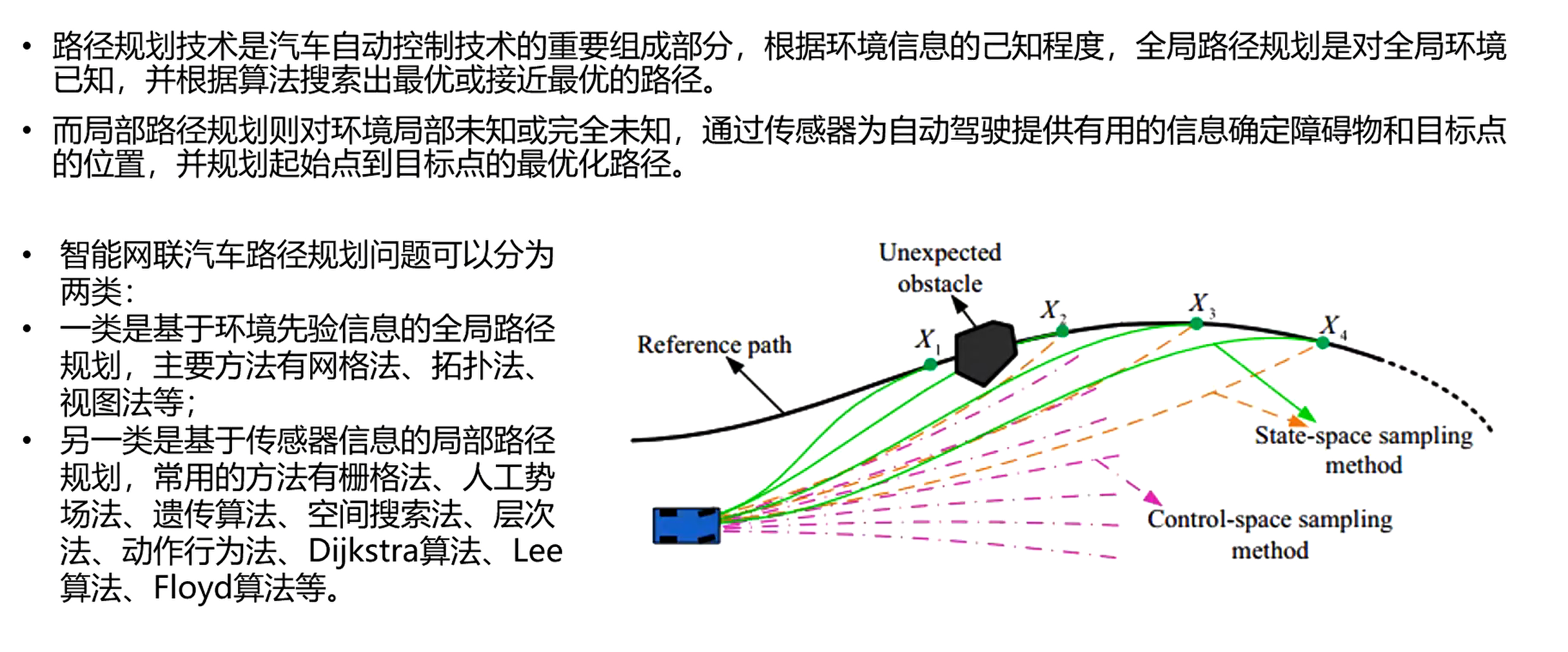
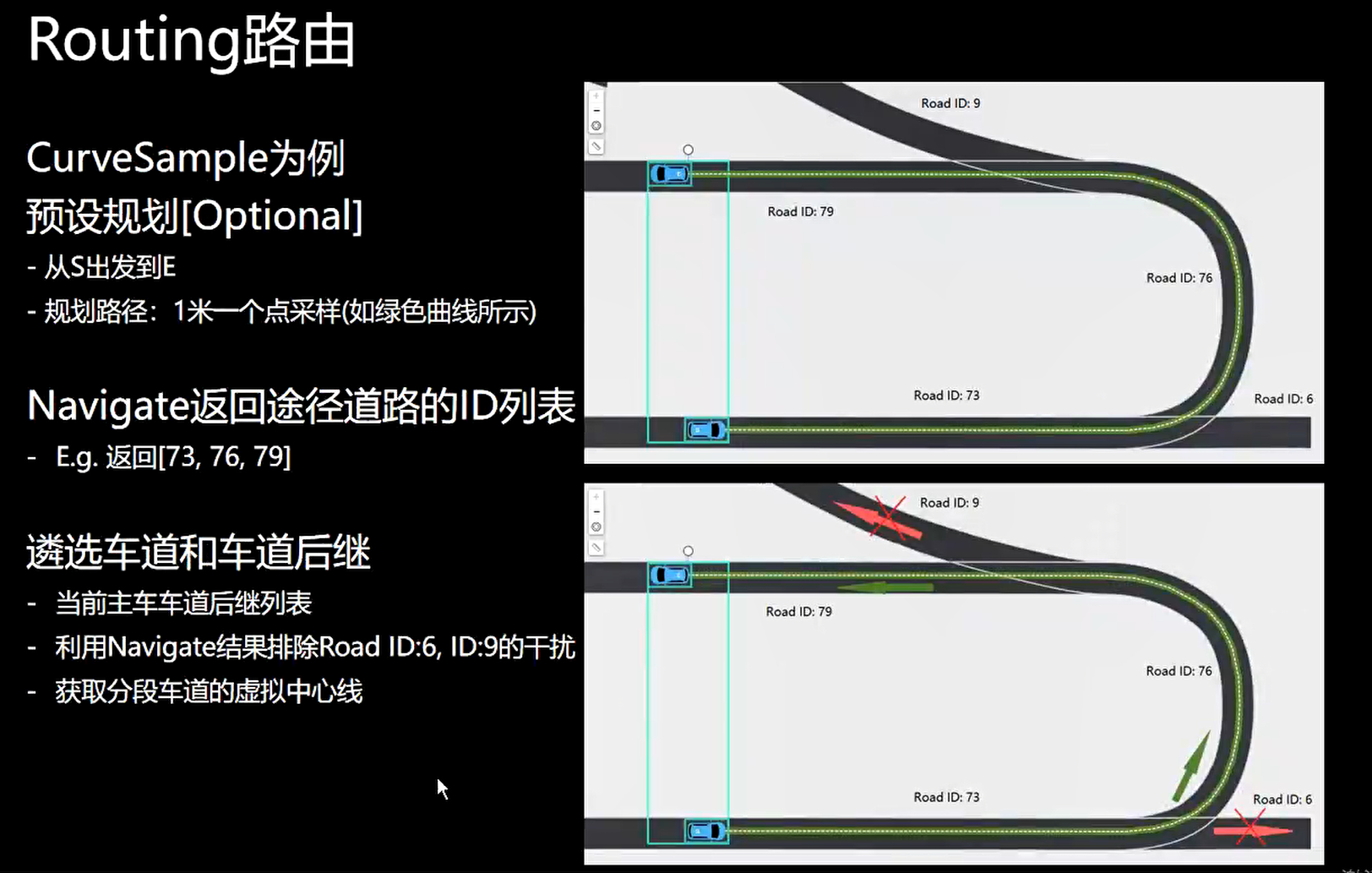
55' 全局路径算法(导航)与局部路径算法
1h06’备赛规划
1h15' 仿真平台建设-国创中心(建议直接跳到1h33’
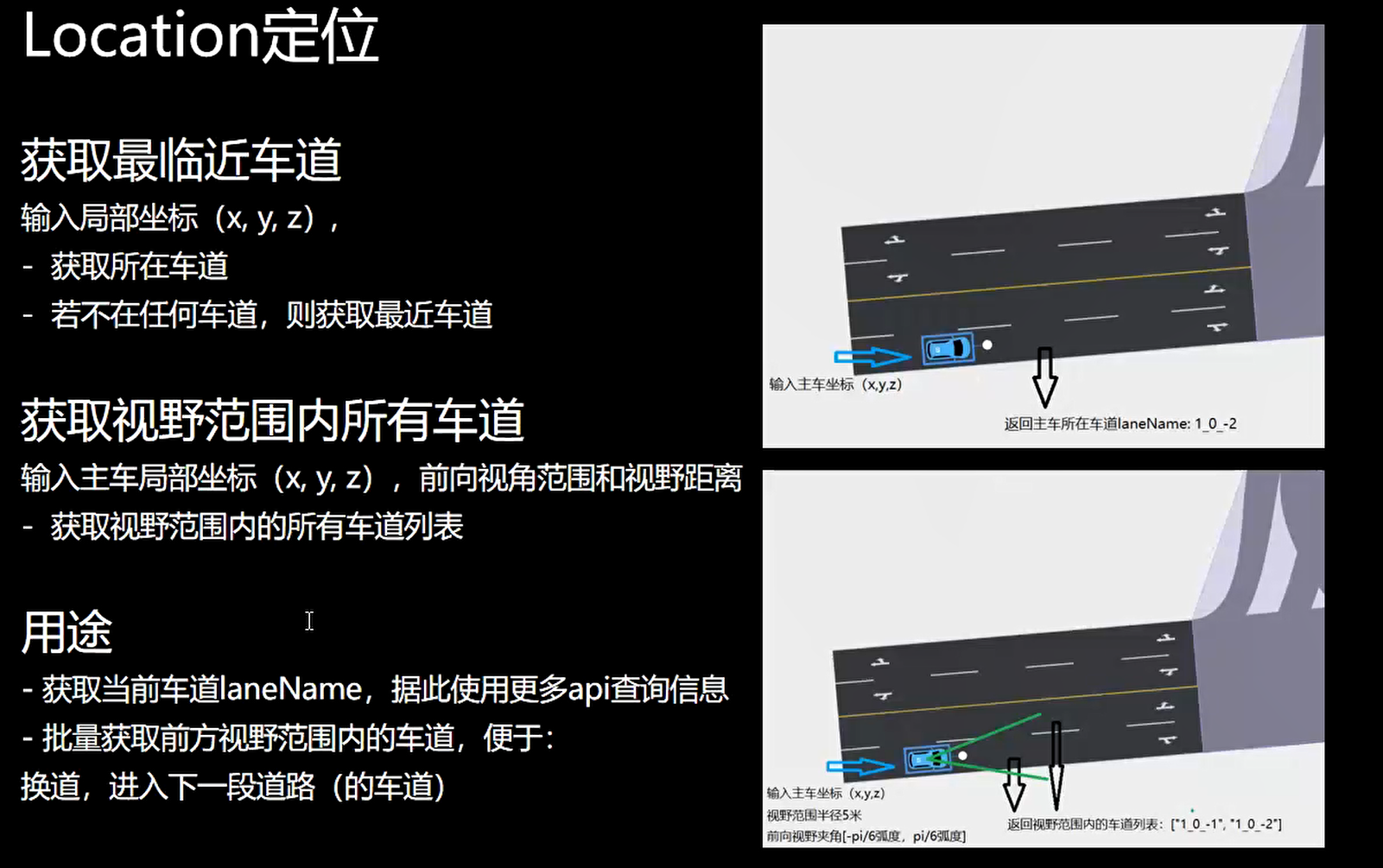
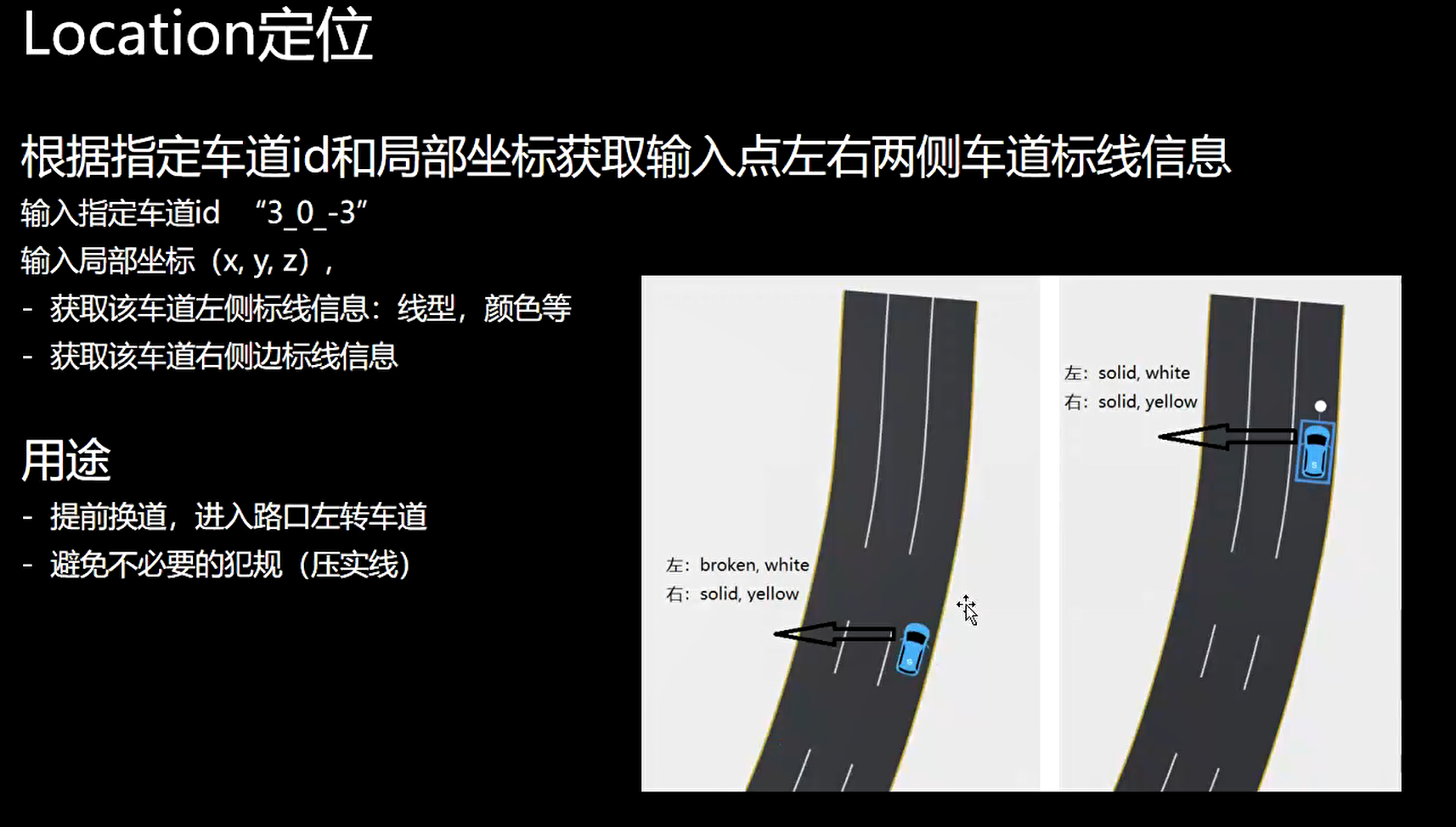
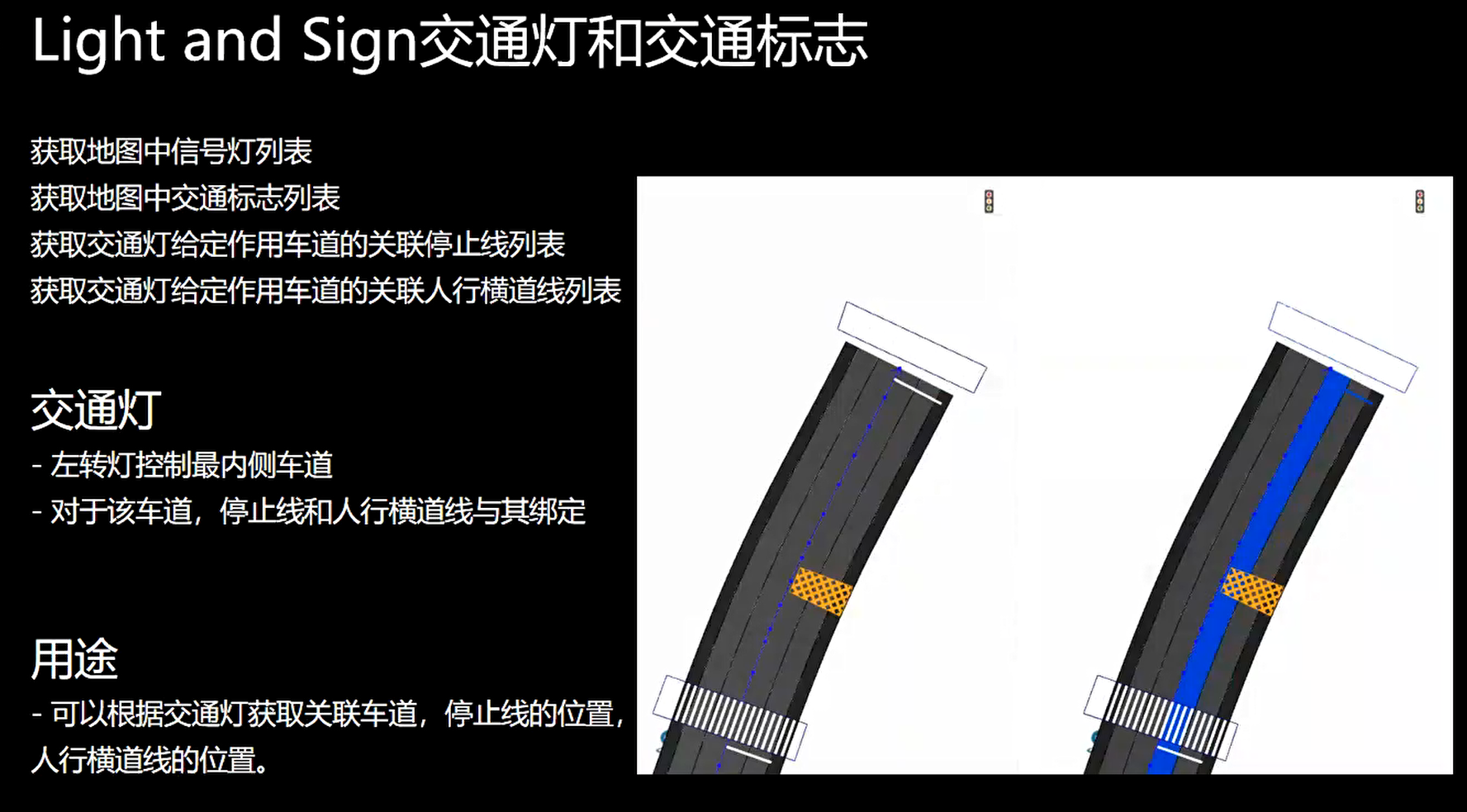
1h33' API-算法实现
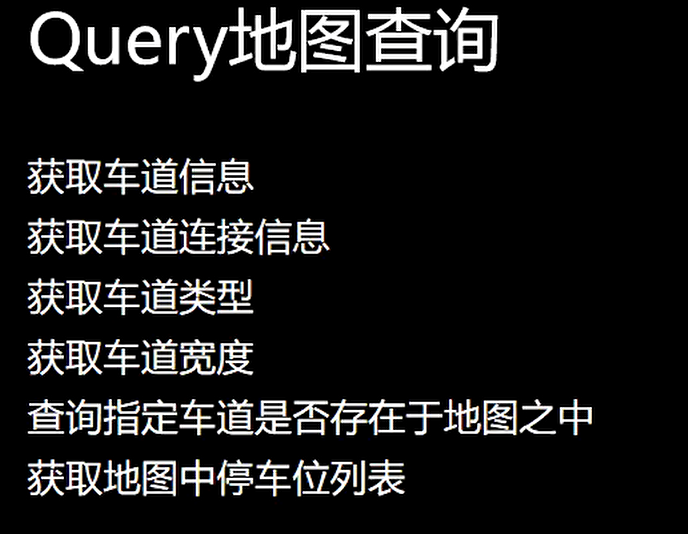
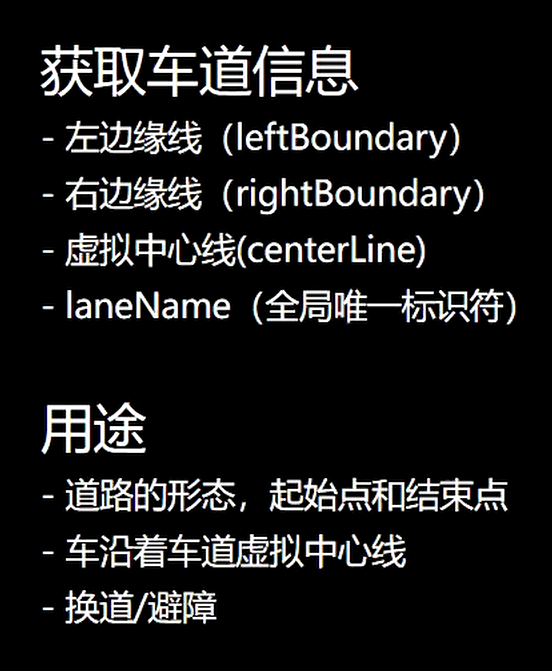
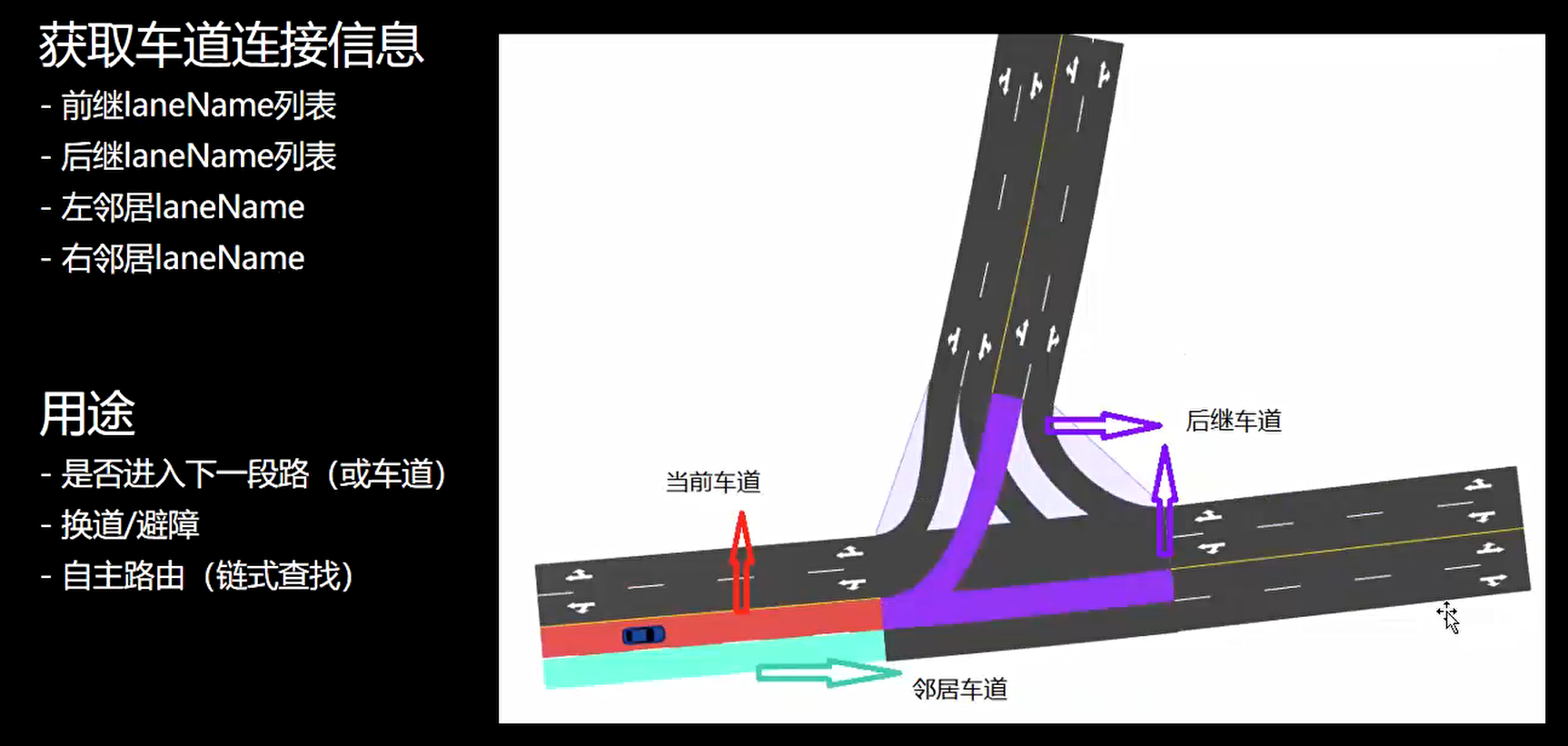
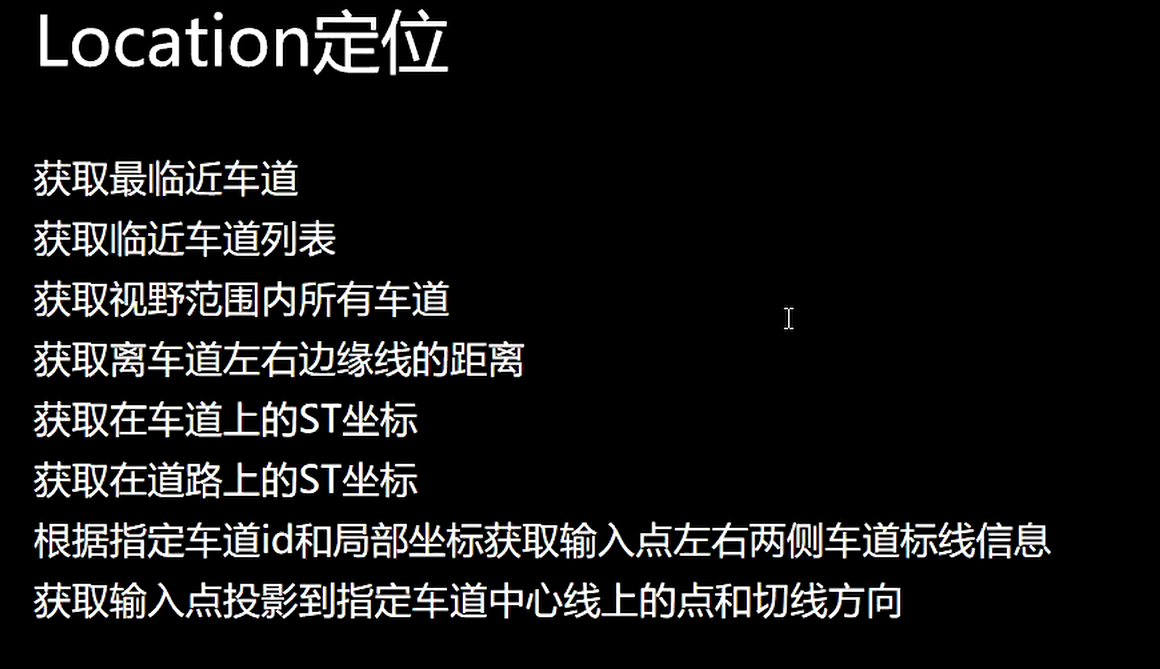
2h19' 高精度地图
2h55' 控制算法设计
3h10' 答疑
内容概要
4'30 致辞——11:30
产业应用
科研课题
功能性很强
12'30 讲报名流程、规则(跳过
报名
www.gcxl.edu.cn
加密狗申请问题
28'30 知识结构建议 南京理工大学-马勇
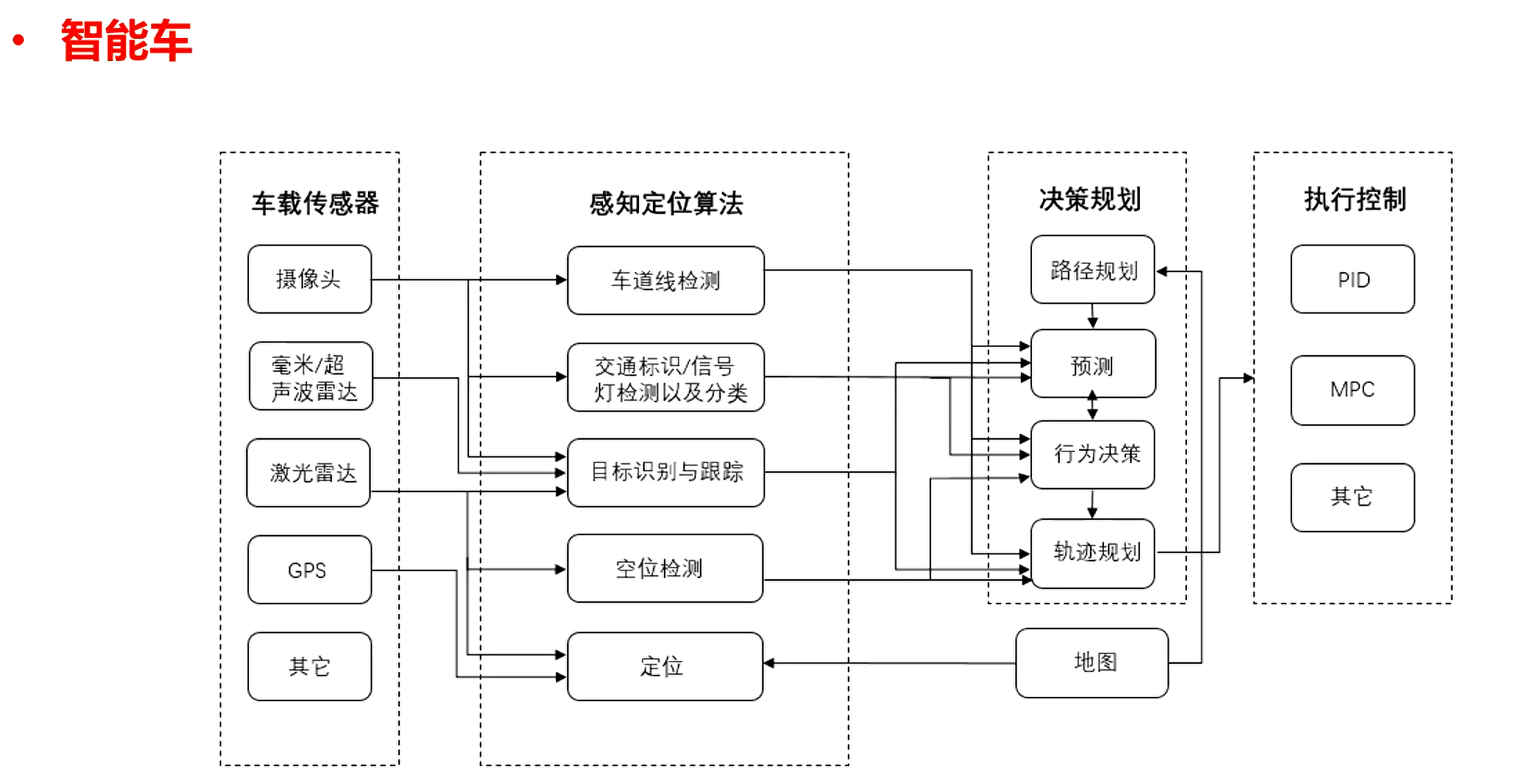
平台提供感知定位算法,只须做决策规划部分
38' 学习资料
55' 全局路径算法(导航)与局部路径算法
神经网络:可遥控
对车辆模型进行了解,驾驶中的平稳性
1h06’备赛规划
1h15' 仿真平台建设-国创中心(建议直接跳到1h33’
仿真平台操作
案例库-赛题测试
任务管理-任务日志
资源库-地图模型
1h33' API-算法实现
2h19' 高精度地图
前继与后继不唯一,邻居确定是否唯一存在
获取车道线,避免压实线
排除全局规划时排除路径在后继中出现的干扰
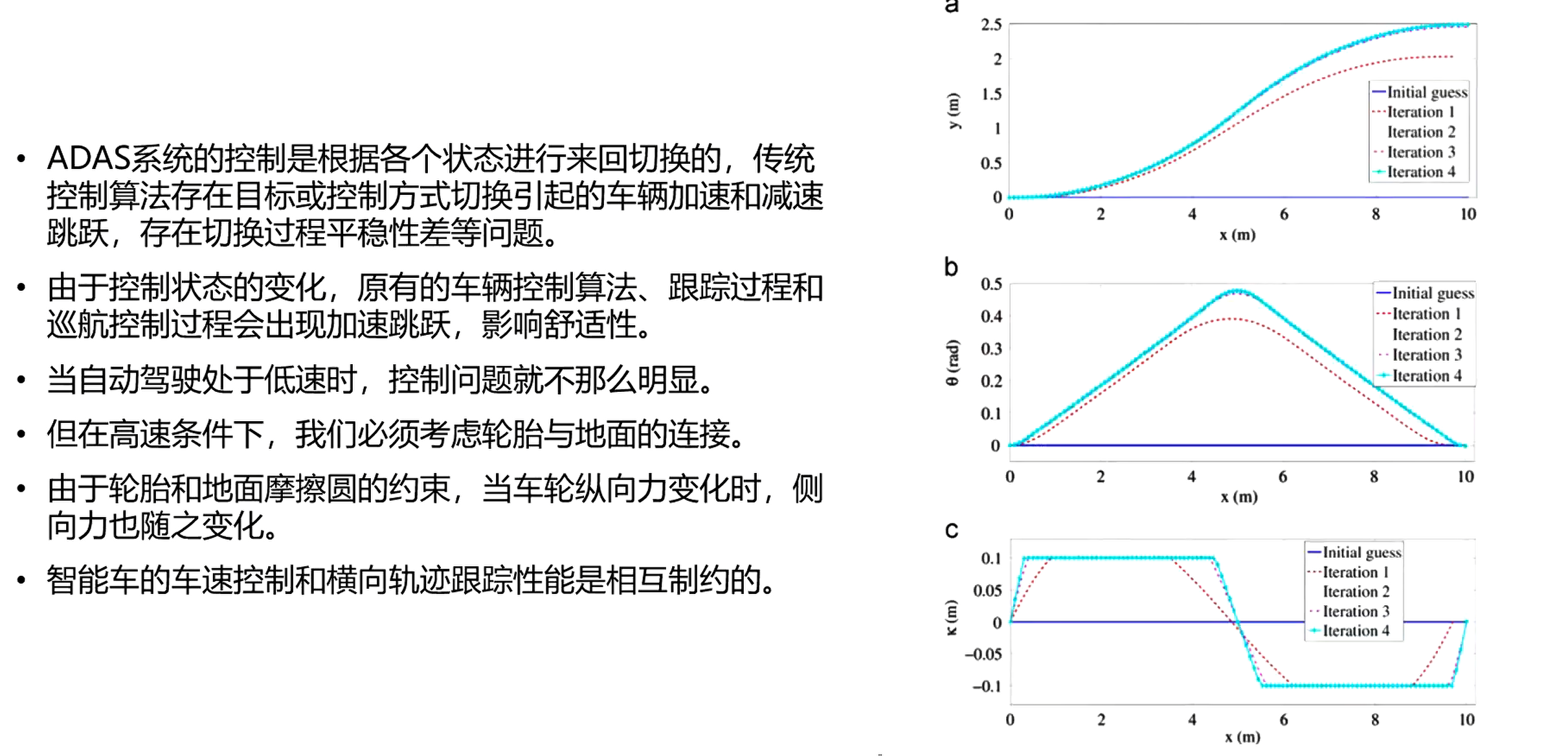
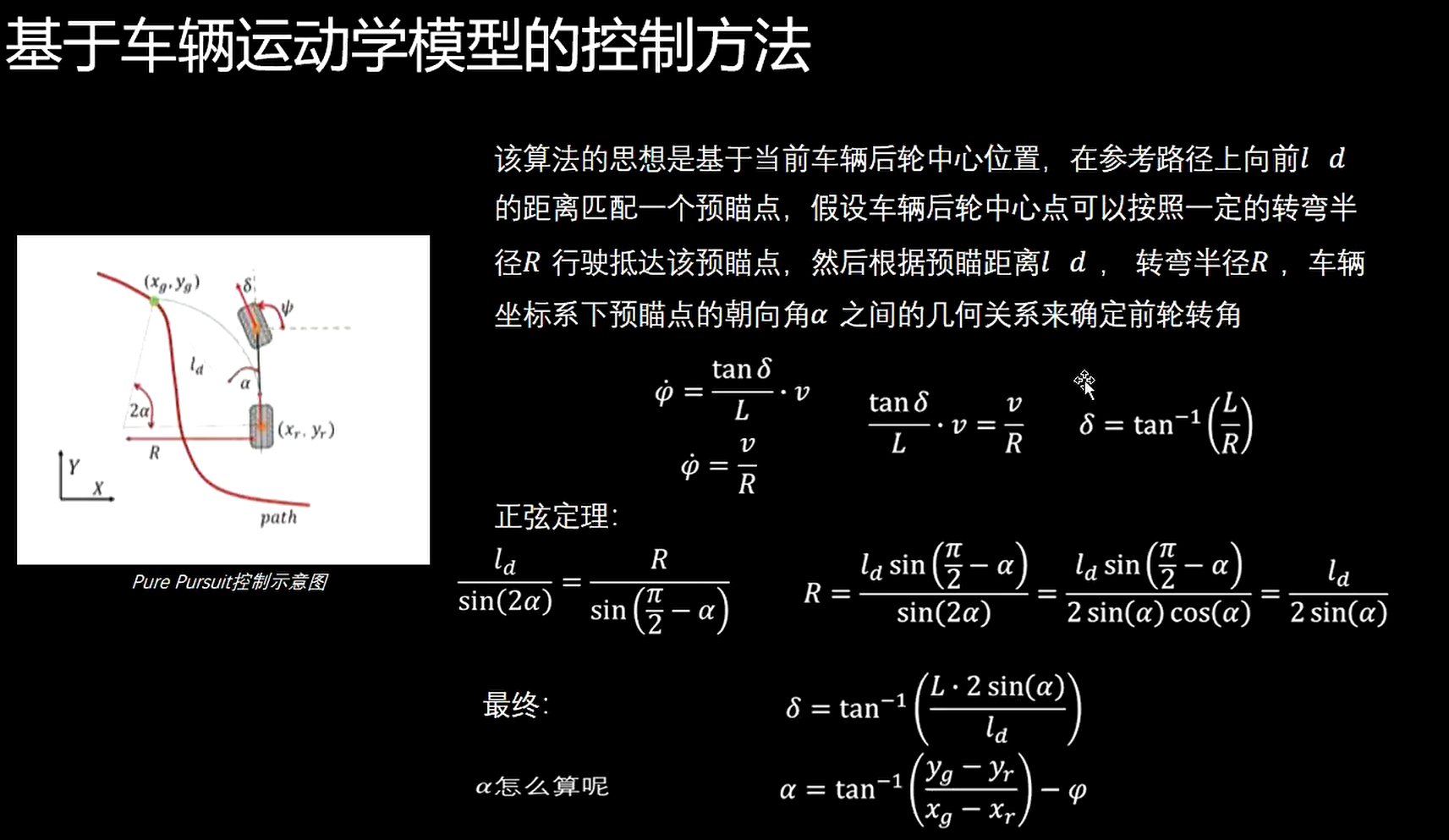
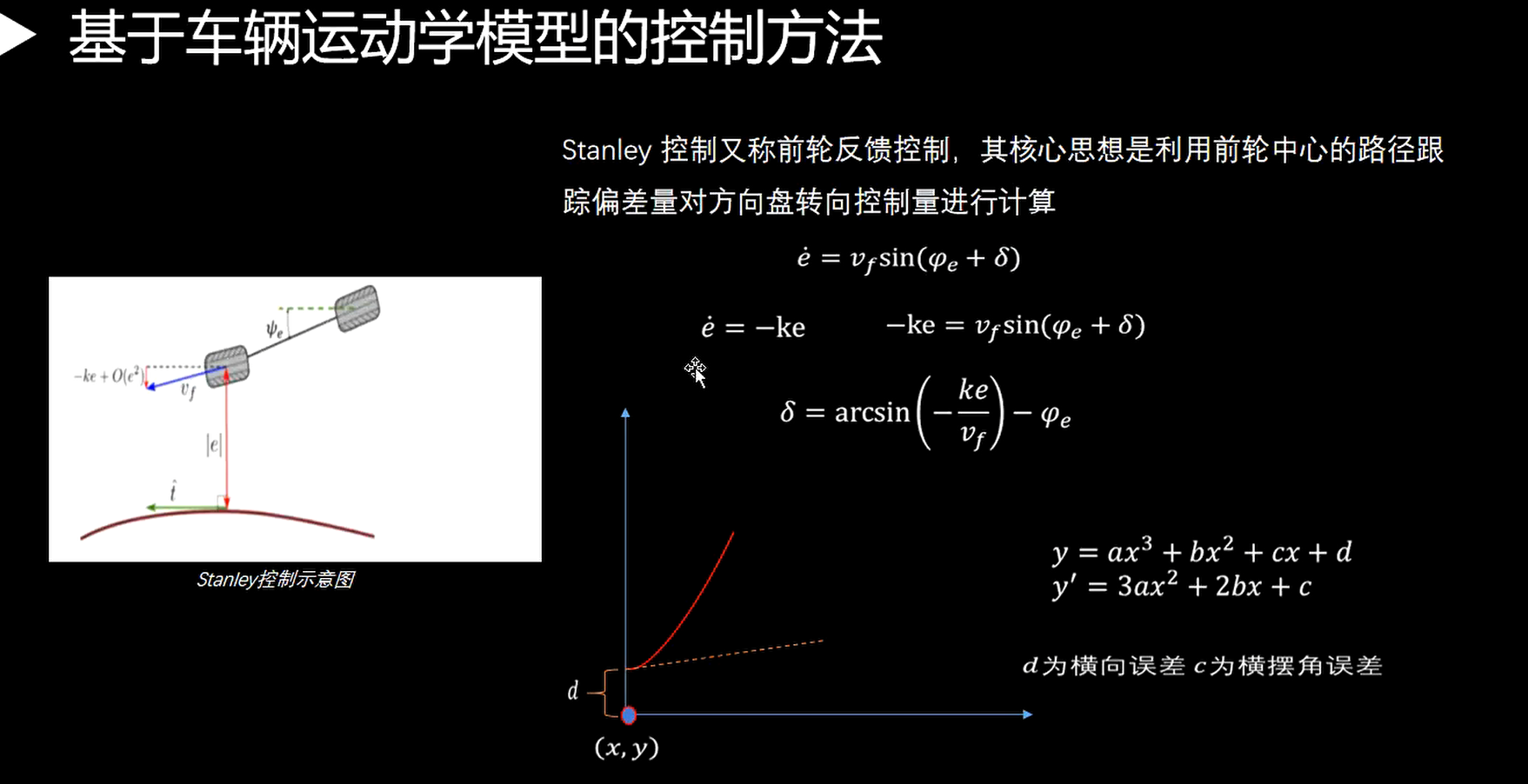
2h55' 控制算法设计
概述
横向控制:方向盘
纵向控制:油门、刹车
横向
传统pid-鲁棒性较差
基于模型(运动学对于比赛足够
不能倒车,k<1,前轮自由度-35°~35°
纵向
PID
3h10' 答疑
提交分数如何对应队伍?
每个队伍对应一个加密狗,上传数据包括加密狗的序号
能否下载手动控制数据进行深度学习
在测试报告pdf文件下方有下载数据链接(?)
周榜成绩
不做分数为0;提交多次取最优