神经网络 简介
数学知识补充:
协方差矩阵 向量的协方差矩阵为:
Cov(X)=
\begin{bmatrix}
Var(X_1) & Cov(X_1,X_2) & Cov(X_1,X_3) & \dots & Cov(X_1,X_N)\\
Cov(X_2,X_1) & Var(X_2) & Cov(X_2,X_3) & \dots & Cov(X_2,X_N) \\
Cov(X_2,X_1) & Cov(X_2,X_3) & Var(X_3) & \dots & Cov(X_2,X_N) \\
\vdots & \vdots& \vdots& \ddots&\vdots\\
Cov(X_N,X_1) &Cov(X_N,X_2)&Cov(X_N,X_3)&\dots & Var(X_N)
\end{bmatrix}
:函数取最大最小时参数的取值。
e.g.
x = \argmin_x f(x;\Theta)
表示含参变量的函数在(S为定义域)取最小值时自变量的取值
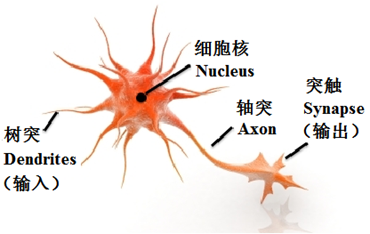
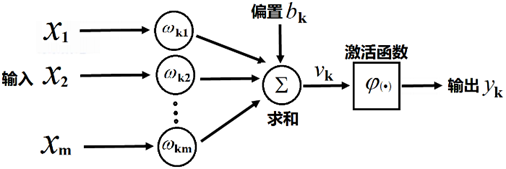
神经元与单层神经网络
人工神经网络是用于模拟人的神经网络。
感知机/单层神经网络
感知器算法
感知器算法(Perceptron Algorithm):
随机选择和;
取一个训练样本
情形a 若 且,则:
情形b 若 且,则:
再取另一个,回到步骤2
终止条件:直到所有输入输出对 都不满足步骤2中a和b之一,退出循环。
历史意义: 1956年,Frank Rosenblatt成功证明了这个算法。该算法的成功证明,使得这种算法被认为机器学习的最原始算法
结论: 经过以上有限步操作,最终一定能找到一个超平面,使得该平面能够成功将两类分开。
对于输入维向量,定义以下维向量
\vec{x_i}=\begin{bmatrix}
x_i \\
1
\end{bmatrix},\quad 情形a
\vec{x_i}=\begin{bmatrix}
-x_i \\
-1
\end{bmatrix}, \quad 情形b
w=\begin{bmatrix}
w \\ b
\end{bmatrix}
原始问题转化为,经过有限步操作后,一定存在一个超平面:
w^T\vec{x_i}+b>0
定理: 如果存在一个向量,使得,都有,则对感知器算法,经过有限步后,一定存在一个,对,都有
证: 不失一般性,设。 如果对,都有,那么定理一定成立。 否则,假设,使得,则根据感知器算法,,等价于 两边取模平方,有:
||w(k+1)-aw_{opt}||^2=||w(k)-aw_{opt}||^2+||\vec{x_i}||^2+2(w(k)-aw_{opt})^T\vec{x_i}
故有:
||w(k+1)-aw_{opt}||^2\leq||w(k)-aw_{opt}||^2+||\vec{x_i}||^2-2aw_{opt}^T\vec{x_i}
定义
\beta=\max_{i=1}^N||\vec{x_i}||,\gamma=\min_{i=1}^N(w_{opt}^Tx_i)(\beta>0,\gamma>0)
若,则有:
||w(k+1)-aw_{opt}||^2\leq||w(k)-aw_{opt}||^2-1 \tag{1}
由假设,易知
||aw_{opt}||=\frac{\beta^2+1}{2\gamma}
再定义
D=||w(0)-aw_{opt}||
至多经过次对式的迭代,有最终收敛于(也就是说,最多次后一定能找到一个,使得原定理成立)
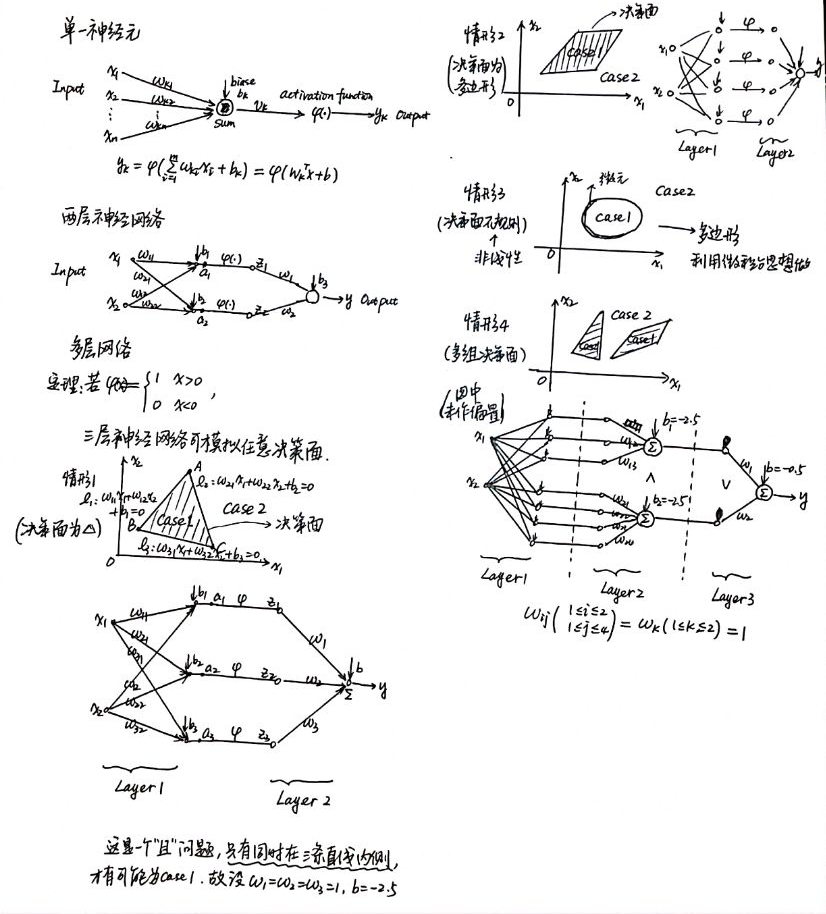
多层神经网络
多层感知机构成的神经网络优缺点
优势:
基本单元简单,多个基本单元可扩展为非常复杂的非线性函数。因此易于构建,同时模型有很强的表达能力。
训练和测试的计算并行性非常好,有利于在分布式系统上的应用。
模型构建来源于对人脑的仿生,话题丰富,各种领域的研究人员都有兴趣,都能做贡献。
劣势:
数学不漂亮,优化算法只能获得局部极值,算法性能与初始值有关。
不可解释。训练神经网络获得的参数与实际任务的关联性非常模糊。
模型可调整的参数很多 (网络层数、每层神经元个数、非线性函数、学习率、优化方法、终止条件等等),使得训练神经网络变成了一门“艺术”。
如果要训练相对复杂的网络,需要大量的训练样本。
模型:
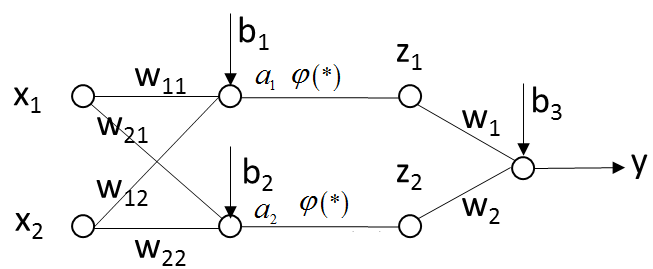
\begin{matrix}
a_1 = w_{11}x_1 + w_{12}x_2 + b_1 \\
a_2 = w_{21}x_1 + w_{22}x_2 + b_2 \\
z_1 = φ(a_1) \\
z_2 = φ(a_2) \\
y = w_1z_1+w_2z_2+b_3
\end{matrix}
其中,是一个非线性函数。
如果没有函数的映射,有:
y = [w_{1}w_{11}+w_{2}w_{21}]x_1+[w_{2}w_{12}+w_{2}w_{22}]x_2+[w_1b_1+w_2b_2+b_3]
这与单一神经元没有区别
非线性的激活函数:
φ(x)=\epsilon(x)=
\begin{cases}
1 &{x>0,} \\
0 &{x<0.}
\end{cases}
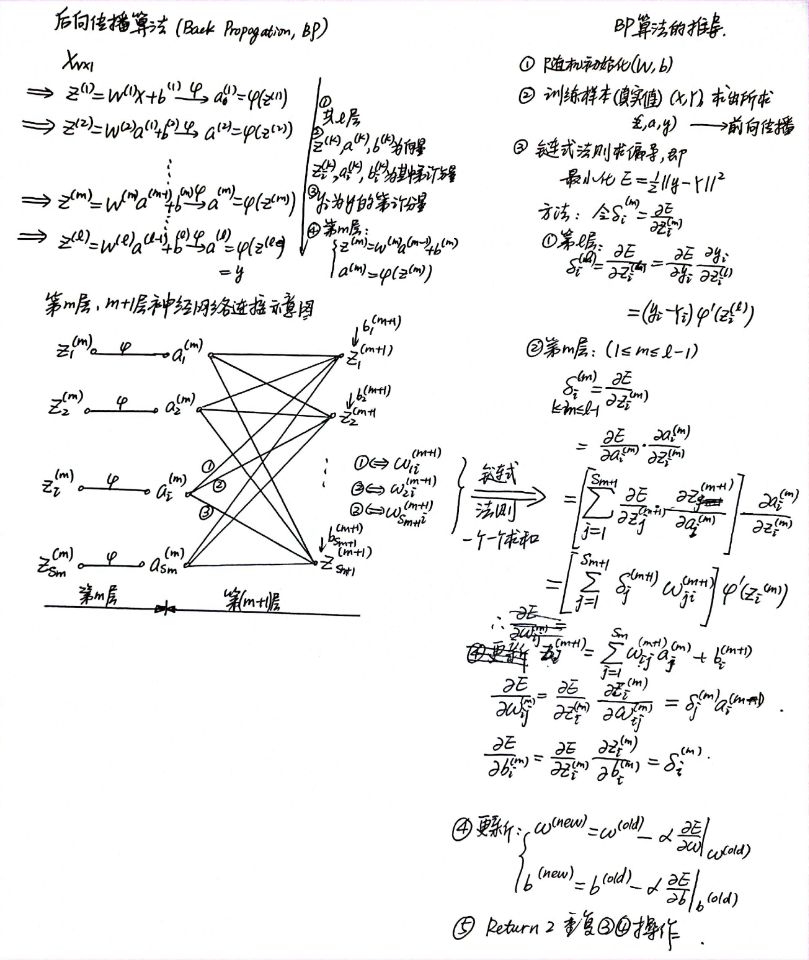
后向传播算法(Back Propagation,BP)
https://www.zhihu.com/question/27239198
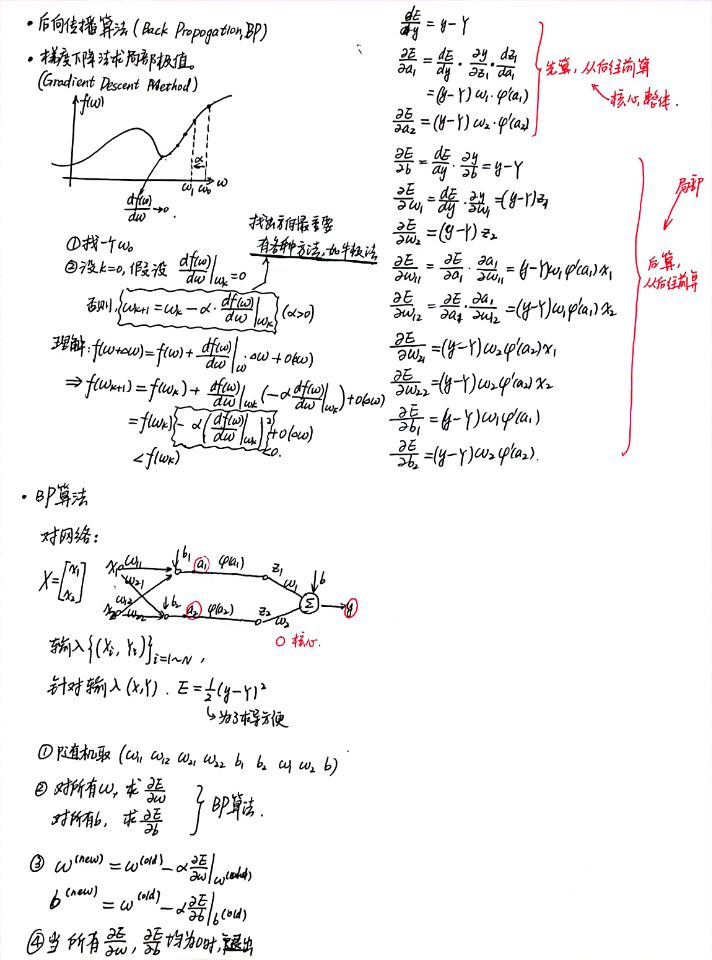
参数设置
1. 随机梯度下降
不用每输入一个样本就去变换参数,而是输入一批样本(叫做一个BATCH或MINI-BATCH),求出这些样本的梯度平均值后,根据这个平均值改变参数。(就是不像前面那样一个一个地训练,每次花费时间太长)
在神经网络训练中,BATCH的样本数大致设置为500-2000不等。
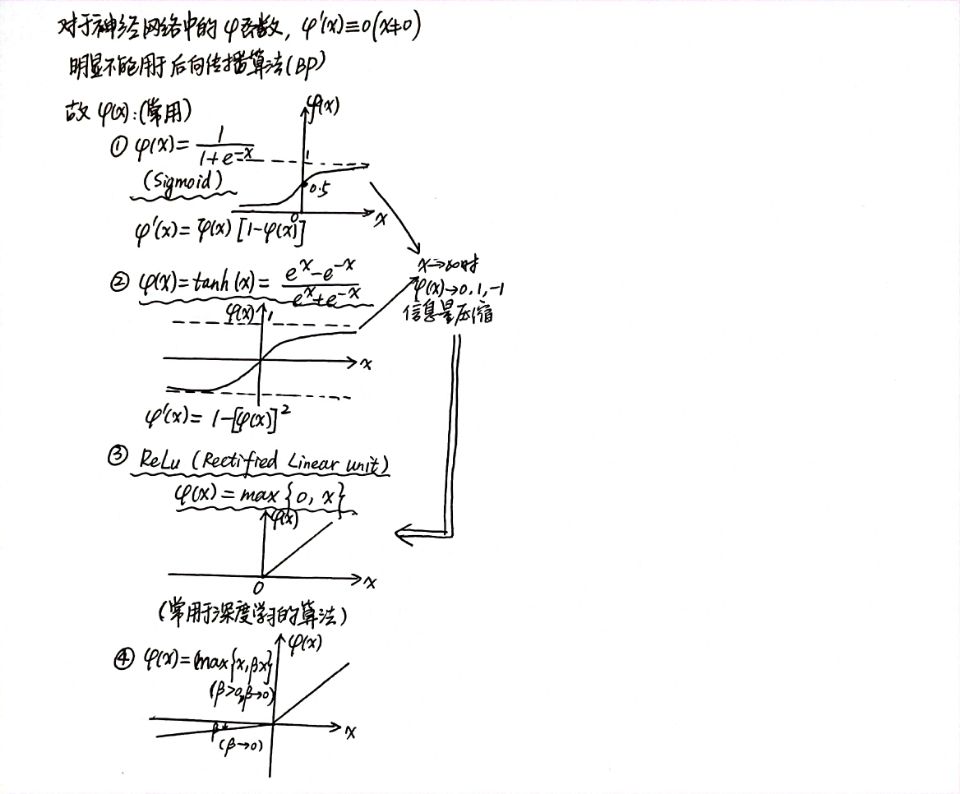
2. 激活函数选择
Sigmoid函数(Logistic)
f(x)=\frac{1}{1+e^{-x}}
tanh函数
f(x)=\frac{e^x-e^{-x}}{e^x+e^{-x}}
ReLu函数(深度学习)
f(x)=\max\{0,x\}
3. 训练数据初始化建议
建议: 做均值和方差归一化(SVM的课后训练里面也有这一个算法)
X_{new}=\frac{X-X_{mean}}{X_{std}}
4. 初始化方法
梯度消失现象: 如果一开始很大或很小,那么梯度将趋近于0,反向传播后前面与之相关的梯度也趋近于0,导致训练缓慢。因此,我们要使一开始在零附近。(如果所有的都在0附近,由于激活函数在0附近导数的变化率很小,近似线性,破坏了神经网络的非线性优势)
一种比较简单有效的方法是:初始化从区间 均匀随机取值。其中为所在层的神经元个数。可以证明,如果X服从正态分布,均值0,方差1,且各个维度无关,而是的均匀分布,则是均值为0, 方差为的正态分布
5. Batch Normalization
论文: Batch normalization accelerating deep network training by reducing internal covariate shift (2015)(至2021年2月10日,引用次数为24753)
基本思想: 既然我们希望每一层获得的值都在0附近,从而避免梯度消失现象,那么我们为什么不直接把每一层的值做基于均值和方差的归一化呢?
算法如下:
Input: Values of over a mini-batch: ; Parameters to be learned:
Output:
计算方法:
\hat {x}_i \leftarrow \frac{x_i-μ_{\mathcal{B}}}{\sqrt{\sigma_{\mathcal{B}}^2+\epsilon}} \tag{BN-1}y_i\leftarrow\gamma\hat {x}_i +\beta \equiv \mathrm{BN}_{γ,β}(x_i)\tag{BN-2}式中,为
mini-batch统计量均值,为mini-batch统计量方差
反向传播时,与原来的算法相似,据表达式有:
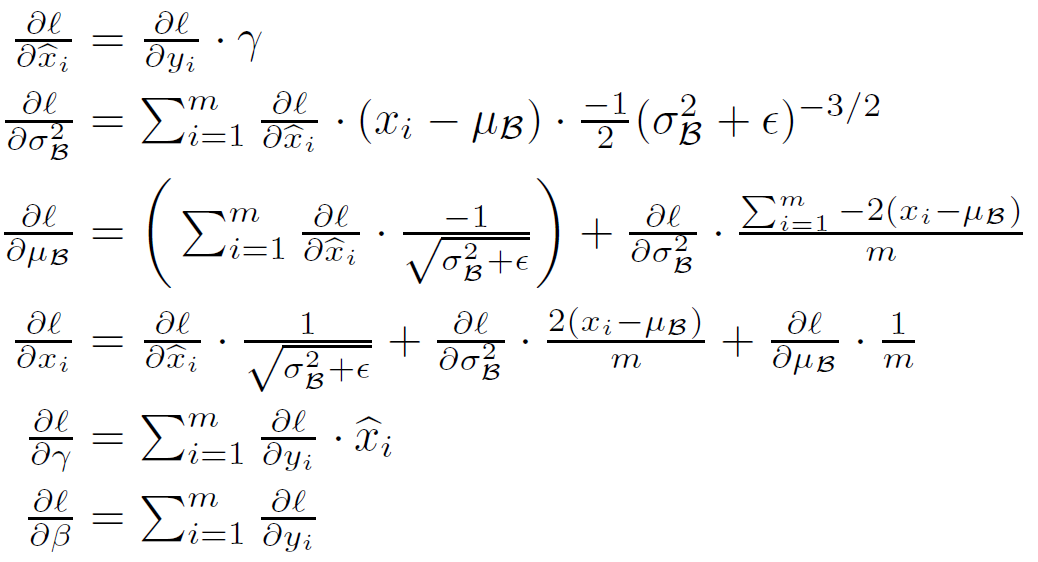 式中,为损失函数(loss function)
式中,为损失函数(loss function)注: 在训练的最后一个epoch时,要对这一epoch所有的训练样本的均值和标准差进行统计,这样在一张测试图片进来时,使用 训练样本中的标准差的期望 和 均值的期望 对测试数据进行归一化,注意这里标准差使用的期望是其无偏估计:
经过试验,发现
Batch Normalization后,学习率的参数选择对最终结果影响比较小
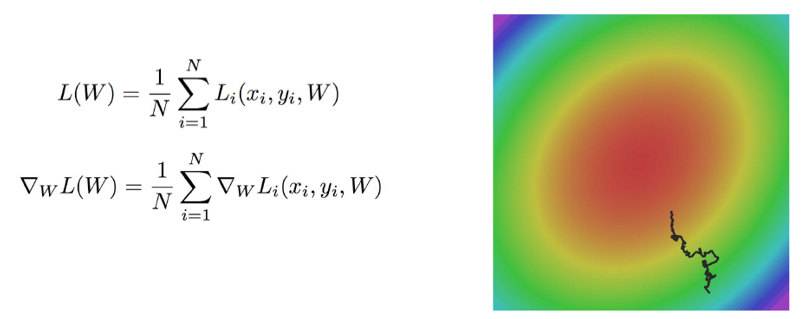
6. 目标函数objective function选择 基本概念
Method 1:可加正则项 Regular Term
L(W)=F(W)+R(W)=\frac{1}{2}\left(\sum_{i=1}^{batch\_size}||y_i-Y_i||^2+\beta\sum_k{\sum_l W_{k,l}^2}\right)
和SVM中使用的正则项一样,此处的正则项也是用于防止出现训练的过拟合。
Method 2:如果是分类问题,可以采用SOFTMAX函数和交叉熵损失函数的组合。 (图在文末)
Softmax假设一个样本有层,且第层输出有N个概率(分为N类,每一个通过神经网络的值为),那么定义一个Softmax,其映射关系如下函数所示:q_i=\frac{\exp{z_i}}{\sum_{j=1}^N\exp{z_j}}Advantages
Able to handle multiple classes only one class in other activation functions—normalizes the outputs for each class between 0 and 1, and divides by their sum, giving the probability of the input value being in a specific class.
Useful for output neurons—typically Softmax is used only for the output layer, for neural networks that need to classify inputs into multiple categories.
强行把输出的值变成概率,应用举例:某一张图片被识别为猫的概率为60%,被识别为狗的概率为40% 另外设定一个向量为目标概率,目的是使及其学习这一进程。 此时产生的误差(
MSEMean Square Error)为\mathrm{MSE}=\frac{1}{2}||q-p||^2定义:
E=-\sum_{i=1}^N p_i\log{q_i}若是SOFTMAX函数和交叉熵的组合,则有结论
\frac{\partial E}{\partial {z_i}}=q_i-p_i
7. 学习率的调节 (不同的梯度下降算法Click Here)
传统方法:
常规的更新 (Vanilla Stochastic Gradient Descent)——固定步长,靠经验分析(传统方法通常用小批量梯度下降)
SGD的问题
(W,b)的每一个分量获得的梯度绝对值有大有小,一些情况下,将会迫使优化路径变成Z字形状。
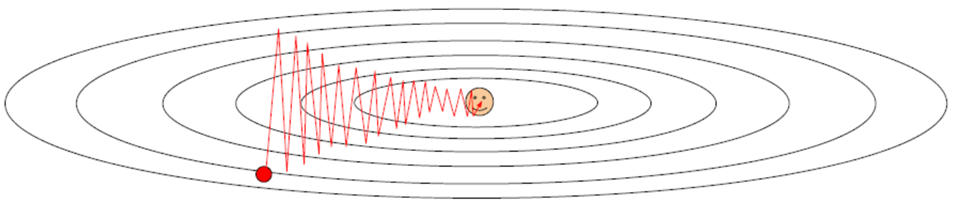
SGD求梯度的策略过于随机,由于上一次和下一次用的是完全不同的BATCH数据,将会出现优化的方向随机的情况。
提出方案:
AdaGradRMSPropMomentum等等,搜寻资料建议直接上慕课公开课或者查阅文献,不建议百度知乎。
训练建议
一般情况下,在训练集上的损失函数的平均值(cost)会随着训练的深入而不断减小,如果这个指标有增大情况,停下来。有两种情况:第一是采用的模型不够复杂,以致于不能在训练集上完全拟合;第二是已经训练很好了。
分出一些验证集(Validation Set),训练的本质目标是在验证集上获取最大的识别率。因此训练一段时间后,必须在验证集上测试识别率,保存使验证集上识别率最大的模型参数,作为最后结果。
注意调整学习率(Learning Rate),如果刚训练几步目标函数cost就增加,一般来说是学习率太高了;如果每次目标函数cost变化很小,说明学习率太低。
Batch Normalization比较好用,用了这个后,对学习率、参数更新策略等不敏感。如果不用
Batch Normalization, 合理变换其他参数组合,也可以达到目的。由于梯度累积效应,
AdaGradRMSPropAdam三种更新策略到了训练的后期会很慢,可以采用提高学习率的策略来补偿这一效应。
基于以上分析,多层神经网络(以两层为例)的图示如下:  Source
Source
本文章使用limfx的vscode插件快速发布