模态分析法
《机械系统动力学》习题
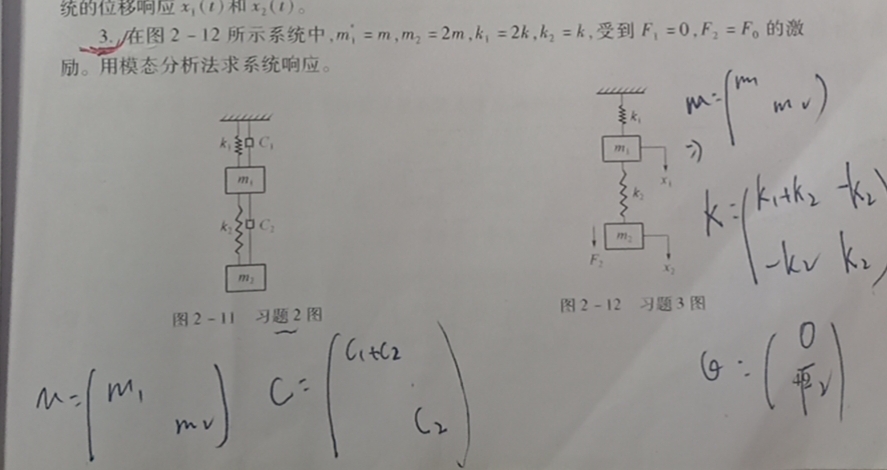
syms k m wn F0 A1 A2
m1=m;m2=2*m;
k1=2*k;k2=k;
F1=0;F2=F0;
F=[F1;F2];
M=diag([m1,m2]);
%振幅列阵
miu=[A1;A2];
K=[k1+k2 -k2;-k2 k2];
%频率方程
s=K-wn^2*M;
%系统的特征矩阵方程
f=s*miu; %注意这里是两个方程
%pretty((solve(det(s),wn))); %求系统的固有频率
wn0=(solve(det(s),wn));
wn1=wn0(4);
wn2=wn0(3);
%在固有频率为wn1时,令A1=1;求A2/A1,的到该固有频率下的振型向量miu^(1)=[1,A2/A1]
A2_1=solve(limit(limit(f(1),A1,1),wn,wn1),A2); % 33^(1/2)/4 + 5/4= 2.6861
%miu1=[1;A2_1];
miu1=[1;2.6861];
%同理求解固有频率为wn2时的振型向量
A2_2=solve(limit(limit(f(1),A1,1),wn,wn2),A2); %5/4 - 33^(1/2)/4= -0.1861
%miu2=[1;A2_2];
miu2=[1;-0.1861];
%模态矩阵
miu=[miu1 miu2];
\begin{cases}\{x\}=[u]\{y\}\\ \{ \ddot{x} \}=[u]\{ \ddot{y}\} \end{cases}
变换后做左乘得到
[u]^T[M][u]\{ \ddot{y}\}+[u]^T[K][u]\{ \ddot{y}\}=[u]^T\{F\}\\
[M_0]\{\ddot{y}\}+[K_0]\{y\}=\{Q\}\\ [M_0]=\begin{bmatrix}M1&0\\0&M2 \end{bmatrix}\\
[K_0]=\begin{bmatrix}K1&0\\0&K2 \end{bmatrix}\\
\begin{cases}M_1\ddot{y_1}+K_1y_1=Q_1\\M_2\ddot{y_2}+K_2y_2=Q_2 \end{cases}
M0=miu'*M*miu;
K0=miu'*K*miu;
Q=miu'*F;
%求解微分方程
%y1=dsolve('M0(1)*D2y1+K0(1)*y1-Q(1)'','y1(0)=0,Dy1(0)=0','t') %求解出的结果并未带入数值,不可取
%可用拉氏变换
syms s t
Y1=Q(1)/(s*(M0(1)*s^2+K0(1))); %解耦后的方程右边求拉氏变换得到Q/s;
Y2=Q(2)/(s*(M0(4)*s^2+K0(4)));
y1=ilaplace(Y1);
y2=ilaplace(Y2);
%将含数字的分式化为小数可用vpa(表达式,n)命令,n表示多少位有效数字
vpa(y1,5); %(0.55464*F0)/k - (0.55464*F0*cos((0.56023*k^(1/2)*t)/m^(1/2)))/k
vpa(y2,5); %(0.054626*F0*cos((1.785*k^(1/2)*t)/m^(1/2)))/k - (0.054626*F0)/k
pretty(vpa(y1,5))
/ 0.56023 sqrt(k) t \
F0 cos| ----------------- | 0.55464
0.55464 F0 \ sqrt(m) /
---------- - -----------------------------------
k k
pretty(vpa(y2,5))
/ 1.785 sqrt(k) t \
F0 cos| --------------- | 0.054626
\ sqrt(m) / 0.054626 F0
---------------------------------- - -----------
k k
pretty(y1)
%看着不爽
/ sqrt(64934) sqrt(161431107) sqrt(k) t \
F0 cos| ------------------------------------- | 268610000
268610000 F0 \ 5779126 sqrt(m) /
------------ - ---------------------------------------------------------
484293321 k 484293321 k
pretty(y2)
%。。。。
/ sqrt(3960246) sqrt(113561107) sqrt(k) t \
F0 cos| --------------------------------------- | 18610000
\ 11880738 sqrt(m) / 18610000 F0
---------------------------------------------------------- - -----------
340683321 k 340683321 k
第2章习题
第2题
微分方程为
() | () | () | () | |
|---|---|---|---|---|
0 | 1 | 0 | 0 | |
0 | 0 | 0 | 1 | |
初始条件:
即:
程序:
m1=20;m2=20;k1=1*10^4;k2=1*10^4;
c1=200;c2=0;
A=[0 1 0 0;-(k1+k2)/m1 -(c1+c2)/m1 k2/m1 c2/m1;0 0 0 1;k2/m2 c2/m2 -k2/m2 -c2/m2];
B=[0;0;0;0];
C=[1 0 0 0;0 0 1 0];
D=[0;0];
sys=ss(A,B,C,D);
y0=[0.02;0;0.04;0];
t=[0:0.01:15];
[x_o,t]=initial(sys,y0,t); %得到x_0=[x_o1 x_o2]
x_o1=[1 0]*x_o';
x_o2=[0 1]*x_o';
subplot(211);
plot(t,x_o1),grid,ylabel('$x_{o1}$','interpreter','latex');
subplot(212);
plot(t,x_o2),grid,ylabel('$x_{o2}$','interpreter','latex'),xlabel('t')
求解非线性方程
输入命令:
[x,y,z]=dsolve('Dx=2*x-3*y+3*z,Dy=4*x-5*y+3*z,Dz=4*x-4*y+2*z','t')
用龙格—库塔法求解常微分方程
首先用降阶法将原微分方程化为一系列的一阶的微分方程组,编写一个M文件的函数,然后调用函数ode45或ode15s即可求解出一阶微分方程组的解,调用方法[T,Y]=ode45('函数名',[求解范围],[初始条件])
令 ,则微分方程可变成如下方程组
%建立.m文件
function dy=asdf(t,y)
dy=zeros(2,1);
dy(1)=y(2);
dy(2)=100*(1-y(1)^2)*y(2)-y(1);
[T,Y]=ode45('asdf',[0 3000],[2 0]);%返回的Y=[y1 y2] %或用ode15s()
plot(T,Y(:,1))
hold on
plot(T,Y(:,2))
legend('y_1','y_2','interpreter','latex')

解微分方程
%建立qwe.m文件
function dy=qwe(t,y) %t为函数自变量的范围,y为函数的初始值
dy=zores(3,1);
dy(1)=y(2)*y(3);
dy(2)=-y(1)*y(3);
dy(3)=-0.51*y(1)*y(2);
%或直接用dy=[y(2)*y(3);-y(1)*y(3);-0.51*y(1)*y(2)];
[T,Y]=ode45('qwe' ,[0 15],[0 1 1]); %T为求解时产生的横坐标的对应值,T-y1,T-y2
plot(T,Y(:,1),'-',T,Y(:,2),'*',T,Y(:,3),'+')
legend('$y_1$','$y_2$','y_3','interpreter','latex')

关于状态空间模型的理解
状态空间模型一般用于求解多个输入与输出的机械系统,如果用矢量矩阵来表示有
其中
在状态空间模型中,A为状态矩阵,B为输入矩阵,A和B决定了该系统的模型(确定了系统的微分方程);C为输出矩阵,D为直接传递矩阵,矢量分别为状态矢量,输入矢量和输出矢量,故在求解系统的响应时需要求解什么响应只需改变输出矢量即可,即改变输出矩阵C和直接传递矩阵D即可

由图可得该系统的状态矢量由的位移和速度组成,输入,输出矢量为,若需要求输出矢量为速度时,则
现以求系统的阶跃响应为例,代码如下:
%求z1和z2
t=0:0.1:200;
A=[0 1 0 0;-9 -2 6 2;0 0 0 1;3 1 -3 -1];
B=[0;0;0;0.5];
C=[1 0 0 0;0 0 1 0];
D=[0;0];
sys=ss(A,B,C,D);
[y,t]=step(sys,t); %此处注意与龙格-库塔算法作区分,返回的y=[y1;y2],不对,返回的格式是一样的,仍为两列数据,可以用size(y)来查看,故返回的y是[y1 y2]
y1=[1 0]*y'; %或用y1=y(:,1) or y1=y*[1 0]'
y2=[0 1]*y';
z1=y1;
subplot(211);
plot(t,z1);
grid on
title('z1响应,z2响应');
ylabel('z1/m');
z2=y2;
subplot(212);
plot(t,z2);
grid
xlabel('t/s');
ylabel('z2/m')
 仿真结果
仿真结果
%求解m1和m2的速度的仿真结果
C_v=[A(1,:);A(3,:)];
D_v=[B(1,:);B(3,:)];
sys_v=ss(A,B,C_v,D_v);
[v,t0]=step(sys_v,t);
v1=[1 0]*v';
v2=[0 1]*v';
subplot(211);
plot(t0,v1);
title('m1与m2的速度响应');
ylabel('$v_1/ms^{-1}$','interpreter','latex');
grid
subplot(212);
plot(t0,v2);
grid
xlabel('t/s');
ylabel('$v_2/ms^{-1}$','interpreter','latex')

运行结果
%求解加速度响应
C_a=[A(2,:);A(4,:)];
D_a=[B(2,:);B(4,:)];
sys_a=ss(A,B,C_a,D_a);
[a,t1]=step(sys_a,t);
a1=[1 0]*a';
a2=[0 1]*a';
subplot(211);
plot(t1,a1);
grid
title('m1和m2的加速度响应');
ylabel('$a_1/m\cdot s^{-2}$','interpreter','latex');
subplot(212);
plot(t1,a2);
grid
xlabel('t/s');
ylabel('$a_2/m\cdot s{-2}$','interpreter','latex')

运行结果
当求以状态空间形式给出的系统对特定初始条件的响应时,matlab可以使用专用命令[y,t]=initail(sys,x0,t)命令,其中为状态矢量的初始值,t是定义的仿真时间,y是输出矢量
矩阵迭代法
机械系统动力学教材例3-3
python程序
import numpy as np
import sympy as sp
L,E,I,m=sp.symbols('L,E,I,m')
M=np.mat(np.diag([m,m,m]))
a=L**3/(768*E*I)*np.mat([[9,11,7],[11,16,11],[7,11,9]])
miu_0=np.mat([1,2,1]).T
miu_1=np.mat([1,1,1]).T
A=a*M
i=1
print('miu=',miu_0)
print('A=',A)
while(abs(miu_0[1]-miu_1[1])>=1e-6):
print("第%d次迭代:" %i)
i+=1
miu_1=miu_0
B=A*miu_1
print('B=',B)
miu_0=B/B[0]
print('miu=',miu_0)
prin()
print('最终结果:')
#B[0,0]=1/(wn^2),B[0]得到的为含中括号的数据,故需要用B[0,0]
wn=(1/B[0,0])**(1/2) #注意此处不能用np.sqrt()
print('miu=',miu_0)
print('wn=',wn)
#运行结果
miu= [[1]
[2]
[1]]
A= [[3*L**3*m/(256*E*I) 11*L**3*m/(768*E*I) 7*L**3*m/(768*E*I)]
[11*L**3*m/(768*E*I) L**3*m/(48*E*I) 11*L**3*m/(768*E*I)]
[7*L**3*m/(768*E*I) 11*L**3*m/(768*E*I) 3*L**3*m/(256*E*I)]]
第1次迭代:
B= [[19*L**3*m/(384*E*I)]
[9*L**3*m/(128*E*I)]
[19*L**3*m/(384*E*I)]]
miu= [[1]
[27/19]
[1]]
第2次迭代:
B= [[601*L**3*m/(14592*E*I)]
[425*L**3*m/(7296*E*I)]
[601*L**3*m/(14592*E*I)]]
miu= [[1]
[850/601]
[1]]
第3次迭代:
B= [[3161*L**3*m/(76928*E*I)]
[13411*L**3*m/(230784*E*I)]
[3161*L**3*m/(76928*E*I)]]
miu= [[1]
[13411/9483]
[1]]
第4次迭代:
B= [[299249*L**3*m/(7282944*E*I)]
[211601*L**3*m/(3641472*E*I)]
[299249*L**3*m/(7282944*E*I)]]
miu= [[1]
[423202/299249]
[1]]
第5次迭代:
B= [[4721603*L**3*m/(114911616*E*I)]
[2225785*L**3*m/(38303872*E*I)]
[4721603*L**3*m/(114911616*E*I)]]
miu= [[1]
[6677355/4721603]
[1]]
最终结果:
miu= [[1]
[6677355/4721603]
[1]]
wn= 4.93329665799035*(E*I/(L**3*m))**0.5
%matlab程序
syms L I E m
M=diag([m,m,m]);
a=L^3/(768*E*I)*[9 11 7;11 16 11;7 11 9];
miu_0=[1 2 1]';
miu_1=[1 1 1]';
A=a*M;
i=1;
while(abs(miu_0(2)-miu_1(2))>10^(-6))
fprintf(['第' num2str(i) '次迭代'])
i=i+1;
miu_1=miu_0;
B=A*miu_1;
%B_str=['B=' num2str(B)]; num2str必须为数值
fprintf(['B=','\n'])
vpa(B)
miu_0=B/B(1);
fprintf(['miu='])
vpa(miu_0)
fprintf('\n')
end
fprintf(['最终结果','\n'])
wn=(1/B(1))^(1/2);
fprintf(['miu='])
vpa(miu_0)
fprintf(['wn='])
vpa(wn)
第1次迭代B=
ans =
(0.049479166666666666666666666666667*L^3*m)/(E*I)
(0.0703125*L^3*m)/(E*I)
(0.049479166666666666666666666666667*L^3*m)/(E*I)
miu=
ans =
1.0
1.4210526315789473684210526315789
1.0
第2次迭代B=
ans =
(0.041186951754385964912280701754386*L^3*m)/(E*I)
(0.058251096491228070175438596491228*L^3*m)/(E*I)
(0.041186951754385964912280701754386*L^3*m)/(E*I)
miu=
ans =
1.0
1.4143094841930116472545757071547
1.0
第3次迭代B=
ans =
(0.041090370216306156405990016638935*L^3*m)/(E*I)
(0.05811061425402107598447032723239*L^3*m)/(E*I)
(0.041090370216306156405990016638935*L^3*m)/(E*I)
miu=
ans =
1.0
1.4142149108931772645787198144047
1.0
第4次迭代B=
ans =
(0.041089015650813736862455622341734*L^3*m)/(E*I)
(0.058108643976941193012056662800098*L^3*m)/(E*I)
(0.041089015650813736862455622341734*L^3*m)/(E*I)
miu=
ans =
1.0
1.4142135813319342754695922125053
1.0
第5次迭代B=
ans =
(0.041088996607618850299694680127029*L^3*m)/(E*I)
(0.058108616277748630738949837760527*L^3*m)/(E*I)
(0.041088996607618850299694680127029*L^3*m)/(E*I)
miu=
ans =
1.0
1.4142135626396374282208817640958
1.0
最终结果
miu=
ans =
1.0
1.4142135626396374282208817640958
1.0
wn=
ans =
((24.337415915738786170713632637051*E*I)/(L^3*m))^(1/2)
机械系统动力学第三章习题
见《振动力学习题精解》p111
程序:
syms m_1 m_2 g L x E I
q=m_1*g/L;
y0=q*x^2*(x^2+6*L^2-4*L*x)/(24*E*I);
F=m_2*g;
y1=F*x^2*(3*L-x)/(6*E*I);
y=y0+y1;
y_max=limit(y,x,L);
rho=m_1/L;
f=g*(int(rho*y,x,0,L)+m_2*y_max)/(int(rho*y^2,0,L)+m_2*y_max^2);
wn=f^(1/2);
pretty(wn)
%运行结果
/ / 3 \ \
| | L g m_1 (2 m_1 + 5 m_2) | |
| g | m_2 #1 + ------------------------ | |
| \ 40 E I / |
sqrt| --------------------------------------------------------- |
| 6 2 2 2 |
| 2 L g m_1 (728 m_1 + 3717 m_1 m_2 + 4752 m_2 ) |
| m_2 #1 + ----------------------------------------------- |
| 2 2 |
\ 181440 E I /
where
3 3
L g m_1 L g m_2
#1 == -------- + --------
8 E I 3 E I
syms k m wn A1 A2 A3
m1=m;m2=m;m3=m;
k1=k;k2=k;k3=k;
miu=[A1;A2;A3];
K=[k1+k2 -k2 0;-k2 k2+k3 -k3;0 -k3 k3];
M=diag([m1,m2,m3]);
f=K-wn*M; %f=0为频率方程
lf=det(f); %lf=0为系统的特征方程
s=f*miu;
wn_123=vpa(solve(lf,wn)); %wn^2
((1.6667*k)/m + ((-(0.4537*k^6)/m^6)^(1/2) + (0.12963*k^3)/m^3)^(1/3) + (0.77778*k^2)/(m^2*((-(0.4537*k^6)/m^6)^(1/2) + (0.12963*k^3)/m^3)^(1/3)))^(1/2)
((1.6667*k)/m - ((-(0.4537*k^6)/m^6)^(1/2) + (0.12963*k^3)/m^3)^(1/3)*(0.5 + 0.86603i) + (k^2*(- 0.38889 + 0.67358i))/(m^2*((-(0.4537*k^6)/m^6)^(1/2) + (0.12963*k^3)/m^3)^(1/3)))^(1/2)
((1.6667*k)/m - ((-(0.4537*k^6)/m^6)^(1/2) + (0.12963*k^3)/m^3)^(1/3)*(0.5 - 0.86603i) + (k^2*(- 0.38889 - 0.67358i))/(m^2*((-(0.4537*k^6)/m^6)^(1/2) + (0.12963*k^3)/m^3)^(1/3)))^(1/2)
wn1=wn_123(4);
wn2=wn_123(5);
wn3=wn_123(6);
s1=limit(limit(s,wn,wn1),A1,1);
[a2 a3]=solve(s1(2),s1(3),A2,A3) %a2=A2,a3=A3,[a2 a3]里面不能有逗号
有毒,全是字母,没意思
例题3-8
syms wn2 A1 A2 A3
M=diag([3 1 2]);
miu=[A1 A2 A3]';
K=[140 -60 -20;-60 220 -80;-20 -80 200];
f=K-wn2*M;
x=f*miu;
w_123=solve(det(f),wn2); %求得wn^2
w1=w_123(2);
w2=w_123(1);
w3=w_123(3);
xx=limit(limit(x,wn2,w1),A1,1);
[a2 a3]=solve(xx(1),xx(2),A2,A3);
miu1=[1 a2 a3]';
xx1=limit(limit(x,wn2,w2),A1,1);
[a_22 a_23]=solve(xx1(1),xx1(2),A2,A3);
miu2=[1 a_22 a_23]';
xx2=limit(limit(x,wn2,w3),A1,1);
[a_32 a_33]=solve(xx2(1),xx2(2),A2,A3);
miu3=[1 a_32 a_33]';
miu_=[miu1 miu2 miu3];
vpa(miu_,4)
本文章使用limfx的vscode插件快速发布