倒立摆小结
之前工作
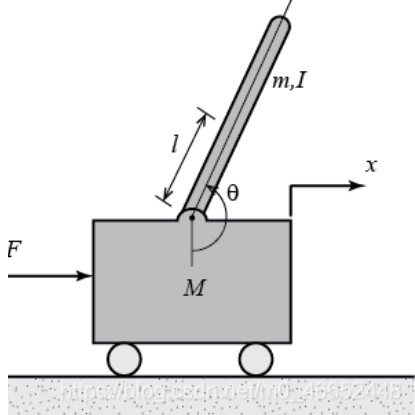
倒立摆,不加控制的比较正常,就是常规的摆动。
使用PID加控制,因为不懂控制原理,就按照一个教程的参数设置了一下。
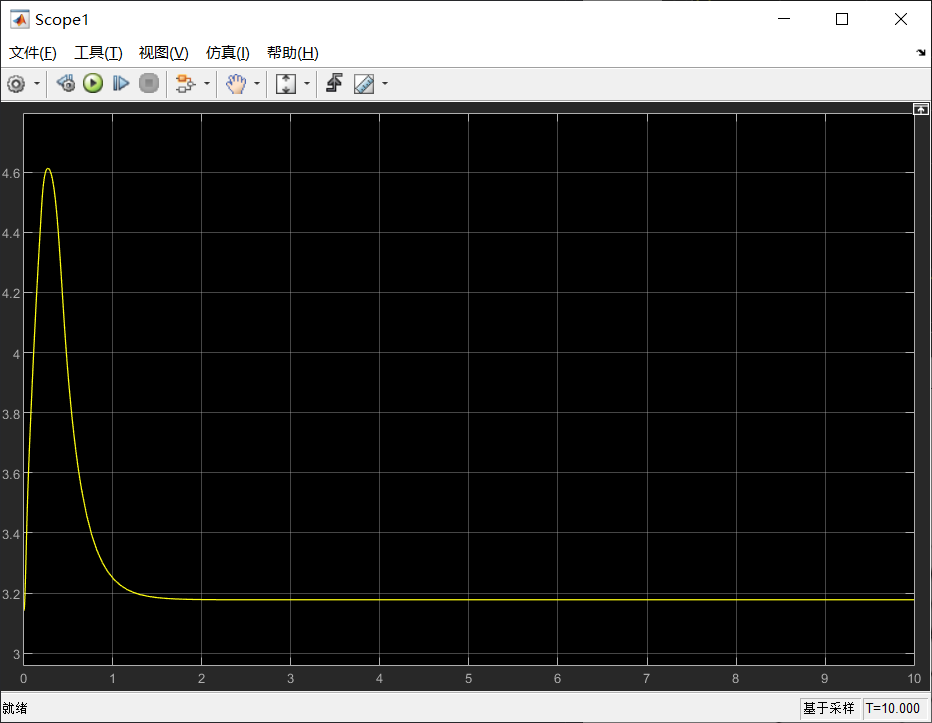
最终还是回去了,看起来有点理想,应该与PID参数有关用到的比较特殊的simulink模块:PIDS、Fcn表达式块(matlab function块),其余都是加减积分这些东西。主要是物理模型建模问题,网上有好多分析。
之后工作
电动力学的结课作业
看DDsim项目代码
倒立摆参考
https://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=SimulinkModeling
https://blog.csdn.net/m0_46652448/article/details/115303623
本文章使用limfx的vscode插件快速发布