PCSVP使用C++重写对性能提升探讨
测试说明
- 目前仿真核心基本还是python版的,除了连续系统在求解时会用到C++的求解器
- 本次测试的目的是为之后使用c++全面重写仿真核心进行提前测试,探究更换语言对性能的提升幅度有多少,为之后的工作开展提供依据
C++版本求解器说明
- 实现了一个简单的仿真引擎,来执行仿真时需要执行的步骤,它可以对模型执行相应的仿真流程
- 对应python版本的simulate方法,cpp版实现了对应的流程initialize()、run()、terminate()
- initialize()方法中只实现了排序和系统的初始化。
- 相比python版本的少了创建运行时model、连接from和goto系统产生的边、模型的展开的步骤。由于目前不支持子系统、from等系统,所以不会有太大影响。
- run()方法就是一个循环,当时间没有结束时就循环调用大步长方法step()。
- 在一个step中,会调用顶层model的output、update、derivate方法。其中derivate方法相当于python版本中ode3的solve方法
- 三个方法都对应了python版本中的相应实现
- terminate方法就是对所有的系统调用terminate
- 实现简单的几个系统,可以用来创建模型即可
- 目前实现了step、state_space和scope
测试方法
- 创建相同的模型,分别在python版和C++版中进行仿真时间的测试
- 选用模型为两个,一个是step->state_space->scope,第二个是step->state_space*5->scope
- 求解器设置为ode3,仿真时间为50和10分别测试,步长固定为1e-3
- python
from dssim_core import Engine import time engine = Engine() # 创建顶层模型 model = engine.create_model() engine.set_primary_model(model) engine.set_parameter("step_size", 1e-3) engine.set_parameter("start_time", 0) engine.set_parameter("stop_time", 10) engine.set_parameter("solver", "ode3") # 创建系统 step = model.create_system("sources.step") ss = model.create_system("continuous.state_space") ss2 = model.create_system("continuous.state_space") ss3 = model.create_system("continuous.state_space") ss4 = model.create_system("continuous.state_space") ss5 = model.create_system("continuous.state_space") scope = model.create_system("sinks.scope") # 连接系统 model.link_system(step, "output", ss, "u") model.link_system(ss, "y", ss2, "u") model.link_system(ss2, "y", ss3, "u") model.link_system(ss3, "y", ss4, "u") model.link_system(ss4, "y", ss5, "u") model.link_system(ss5, "y", scope, "IP0") # model.link_system(ss, "y", scope, "IP0") # 仿真 start = time.time() engine.simulate() end = time.time() print("python version run time is {}s".format(end-start)) - c++
#include <iostream> #include <time.h> #include "engine.hh" int main(int args, char** argv) { time_t start, end; Engine engine; Model* model = engine.createModel(); engine.setPrimaryModel(model); BaseSystem* step = model->createSystem("step"); step->setId("step"); BaseSystem* ss = model->createSystem("state space"); BaseSystem* ss2 = model->createSystem("state space"); BaseSystem* ss3 = model->createSystem("state space"); BaseSystem* ss4 = model->createSystem("state space"); BaseSystem* ss5 = model->createSystem("state space"); ss->setId("ss"); ss2->setId("ss2"); ss3->setId("ss3"); ss4->setId("ss4"); ss5->setId("ss5"); BaseSystem* scope = model->createSystem("scope"); scope->setId("scope"); // model->linkSystem(step, "output", scope, "input"); model->linkSystem(step, "output", ss, "input"); // model->linkSystem(ss, "output", scope, "input"); model->linkSystem(ss, "output", ss2, "input"); model->linkSystem(ss2, "output", ss3, "input"); model->linkSystem(ss3, "output", ss4, "input"); model->linkSystem(ss4, "output", ss5, "input"); model->linkSystem(ss5, "output", scope, "input"); start = clock(); engine.simulate(); end = clock(); std::cout << "C++ version run time is " << (end - start) / 1000000.0 << "s" << std::endl; return 0; }
- python
测试结果
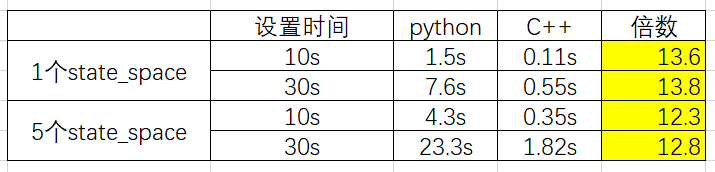 根据四组测试结果,发现cpp版比python快10倍之上。
根据四组测试结果,发现cpp版比python快10倍之上。
本文章使用limfx的vscode插件快速发布