水平位移控制系统
背景说明
- 之前的仿真是研究控制器的稳定性,输入的信号是较小的扰动,控制器应该将这个扰动带来的影响尽快地降低。
- 控制器正常的输入应该是水平位移的设定值X_set,等离子体实际的水平位移X_real是观测值,通过pid控制器进行控制(实际是pi控制器)。
测试pid控制器实际控制效果
- 设置X_set为一个正常的信号,如下
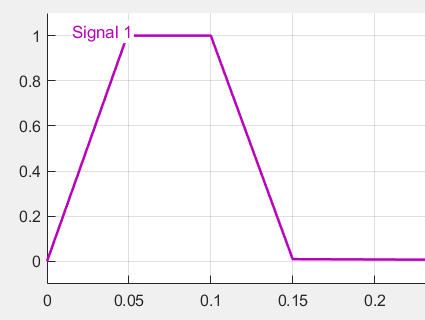 由于原pid的参数是已经确定的,直接看其实际的X_real,效果如下:
由于原pid的参数是已经确定的,直接看其实际的X_real,效果如下:
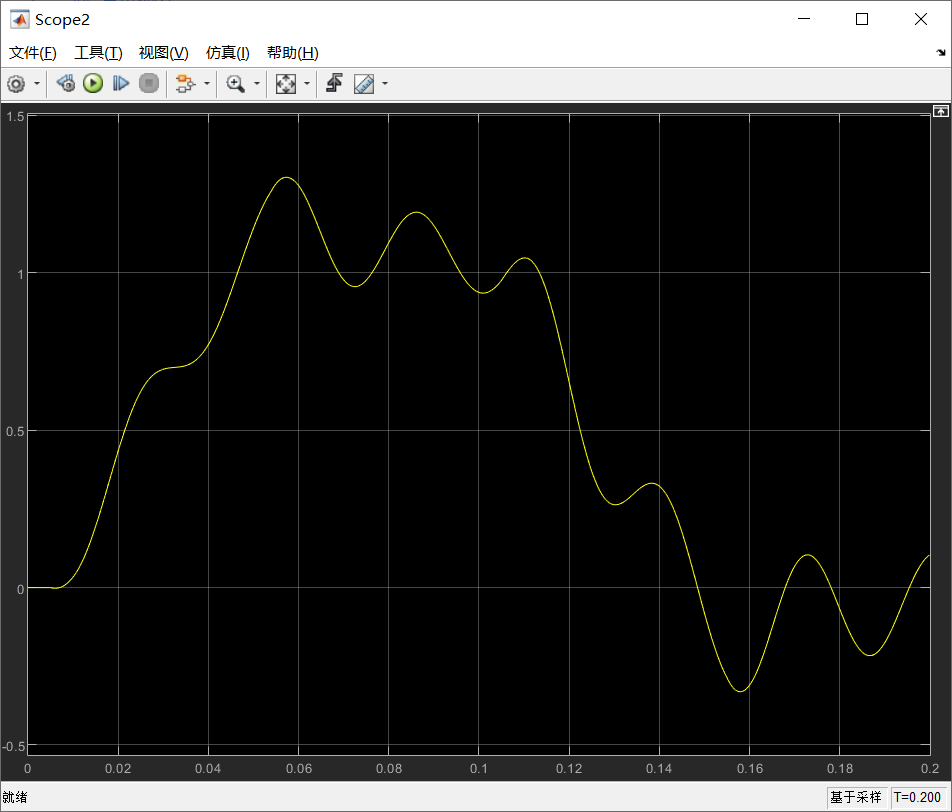 可以看到效果很差,波动很大
可以看到效果很差,波动很大 - 使用自带的调参优化方法,按照网上的教程调了,现在效果还比较差。
本文章使用limfx的vscode插件快速发布