水平位置控制总结
水平位移控制
- 使用传递函数1/(1+st)替换掉原来的延时模块,几乎可以完美替换,对pid控制器来说没有区别。
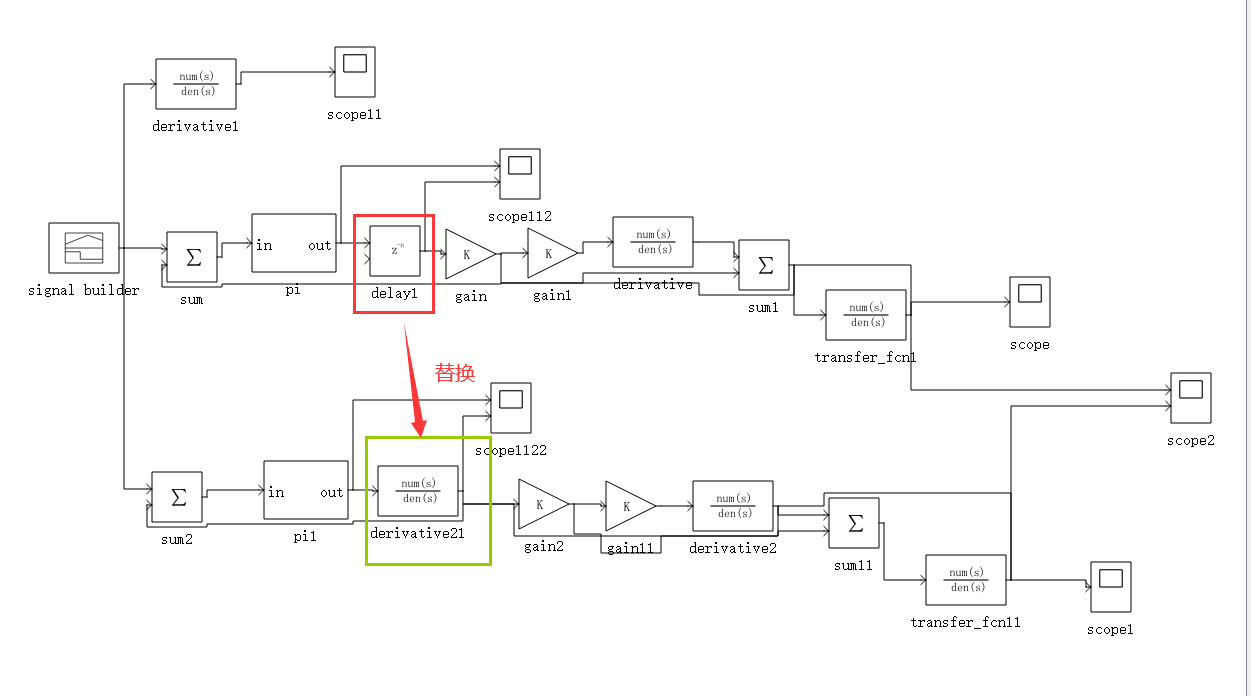
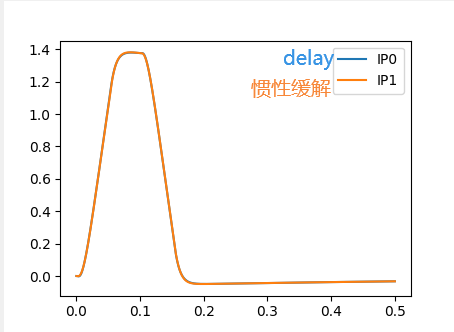
- 同样的,pid的控制信号经过惯性缓解之后,实际效果仍然是延迟。
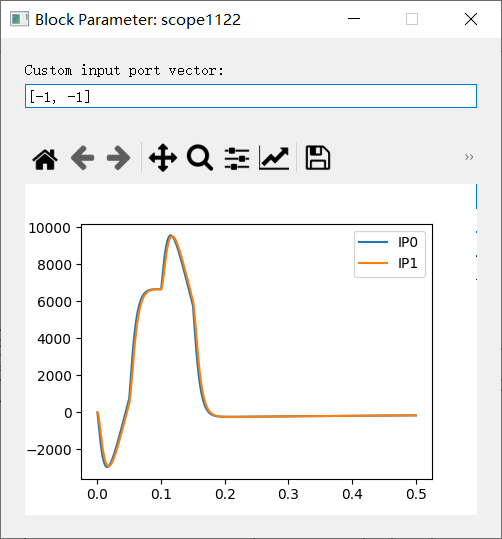
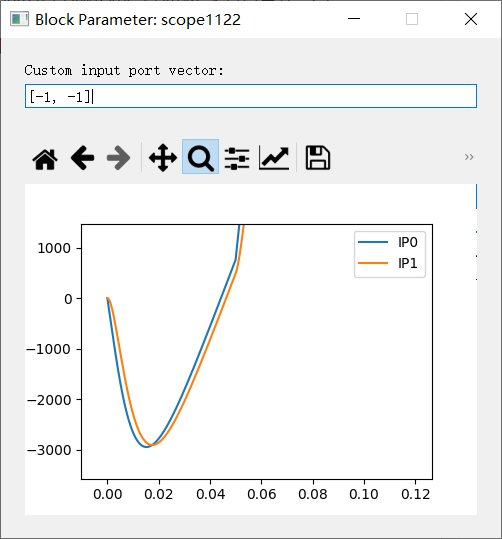
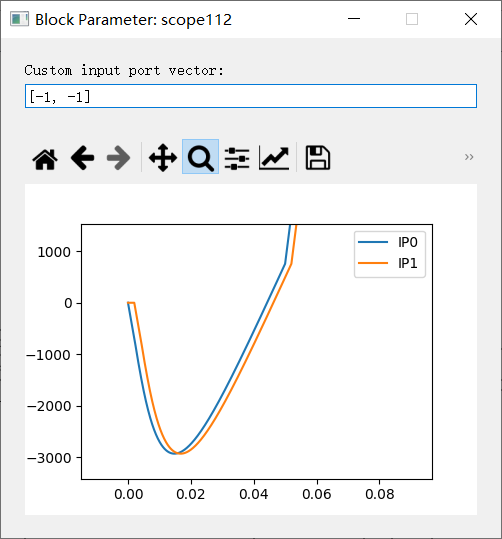 区别只在于最开始的几个信号输出的不是0,但是后边来说还是等同于延迟。
区别只在于最开始的几个信号输出的不是0,但是后边来说还是等同于延迟。 - 对于强化学习控制来说,惯性缓解相比于delay也同样没有改善,训练还是不能收敛。该延时对于整个系统来说的影响比较小,暂时先不处理延时了。
- 文章写了Introduction部分,后边抓紧写完投了。
DSSim bug处理
- 报错无法识别update_on_minor_steps参数的问题,我俩都不能重现,先搁置了。
- 第二定制模块不能显示图标,原因是新旧版本的info.json文件中path字段和type字段的定义有点差异,已经完成了修复。
- 新系统重写的set_parameters函数只被调用一次是系统加载的问题,已经修复。
本文章使用limfx的vscode插件快速发布