DFS and BFS
DFS
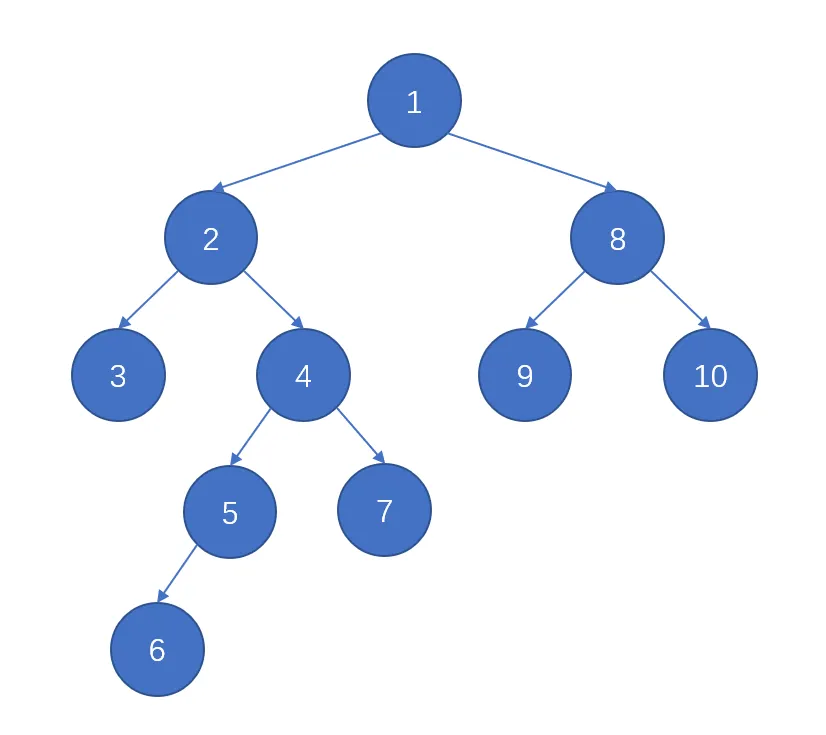
深度优先搜索,从名字上来看就是搜索深度更优先的搜索方式。它会“执着”地走到头,只有无路可走时,它才会后退(回溯)一步,寻找新的路径。若用 DFS 来遍历下面这颗树,那么下图节点上的数字便是 DFS 遍历的先后顺序,我们接下来就具体描述下该顺序:
 DFS 俗称暴力搜索,因为它遍历了所有可能情况,因此它的时间复杂度较高,能处理的数据规模较小。
但 DFS 每次搜索时只记录一条路径的信息,因此空间复杂度较低,为搜索深度。
代码模板
DFS 俗称暴力搜索,因为它遍历了所有可能情况,因此它的时间复杂度较高,能处理的数据规模较小。
但 DFS 每次搜索时只记录一条路径的信息,因此空间复杂度较低,为搜索深度。
代码模板
type dfs(type x, ... ) // 可以存在多个变量
{
if( ... ) // 达成目标,找到答案
{
... // 输出答案或判断最优解等等
return;
}
if( ... ) // 达到搜索边界(即到边界了还没搜到,有时没有此步骤)
{
return;
}
for( ... ) // 遍历所有子节点
{
if( ... ) // 可以转移状态,一般用标志变量判断
{
... // 修改标志变量,表明此节点不可转移
dfs( ... ) // 搜索子节点,经常为x+1
... // 还原标志变量,表面此节点可转移
}
}
}
BFS
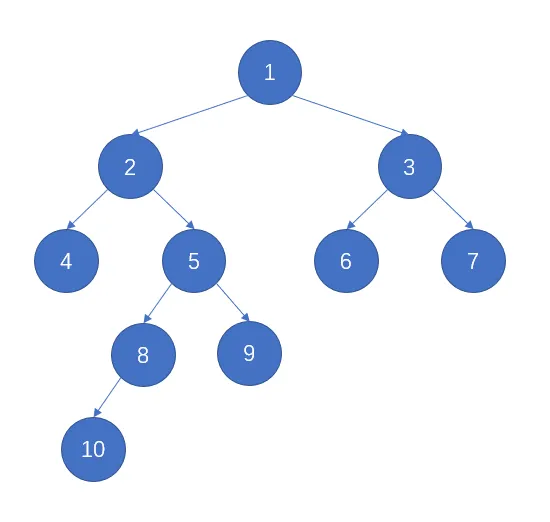
广度(宽度)优先搜索,侧重点就在搜索的广度。它会搜索完当前深度的所有节点,才会深入一层,搜索下一层的节点。若用 BFS 来遍历下面这颗树,那么下图节点上的数字便是 BFS 遍历的先后顺序,我们接下来就具体描述下该顺序:
 可以发现一个性质就是,如果路径长度为 1
,BFS 遍历到的节点深度就等于距起点的距离。因此可以通过 BFS 处理一些最短路问题。
BFS 也可以将所有情况遍历到,那么时间复杂度和 DFS 差不多。但 BFS 我们往往找到答案就会终止,并且可能更快找到答案,因此有时时间复杂度比 DFS 更好。
可以发现一个性质就是,如果路径长度为 1
,BFS 遍历到的节点深度就等于距起点的距离。因此可以通过 BFS 处理一些最短路问题。
BFS 也可以将所有情况遍历到,那么时间复杂度和 DFS 差不多。但 BFS 我们往往找到答案就会终止,并且可能更快找到答案,因此有时时间复杂度比 DFS 更好。
BFS 在每层遍历时需要保存该层所有节点,因此空间复杂度较高。
代码实现模板
bool vis[MAXN]; // 标记是否搜索过,有时也可直接用depth来判断
int depth[MAXN]; // 储存搜索深度,有时可能为二维数组或map
queue<type> que; // STL队列,不过数组模拟队列效率更高
type bfs(type start)
{
que.push(start); // 起点入队
depth[start] = 0; // 起点深度0
vis[start] = true; // 标记起点
while (!que.empty())
{
type now = que.front(); // 当前节点设置为队首
que.pop(); // 弹出队首
if ( ... ) // 如果达到目标条件
{
ans = depth[now]; // 储存答案
return; // 搜索结束
}
for( ... ) // 遍历now节点的所有子节点,可用数组表示方向
{
type next = ... // 计算出子节点
if (!vis[next] && ... ) // 如果子节点未搜索过,且范围符合题目条件
{
vis[next] = true; // 标记子节点
depth[next] = depth[now] + 1; // 子节点深度+1
que.push(next); // 子节点入队
// 有时题目还需输出具体路径,可用一个数组储存每个节点的上一个节点,然后在此处对数组赋值。输出时,从结尾递归反向输出即可获得具体的路径。
}
}
}
}
本文章使用limfx的vscode插件快速发布