通过imu传感器4元数的地平线模拟
3轴模拟转动
之前算法节点订阅过四元数,直接用之前的节点把4元数给rviz2,进行世界坐标和imu坐标的转换,
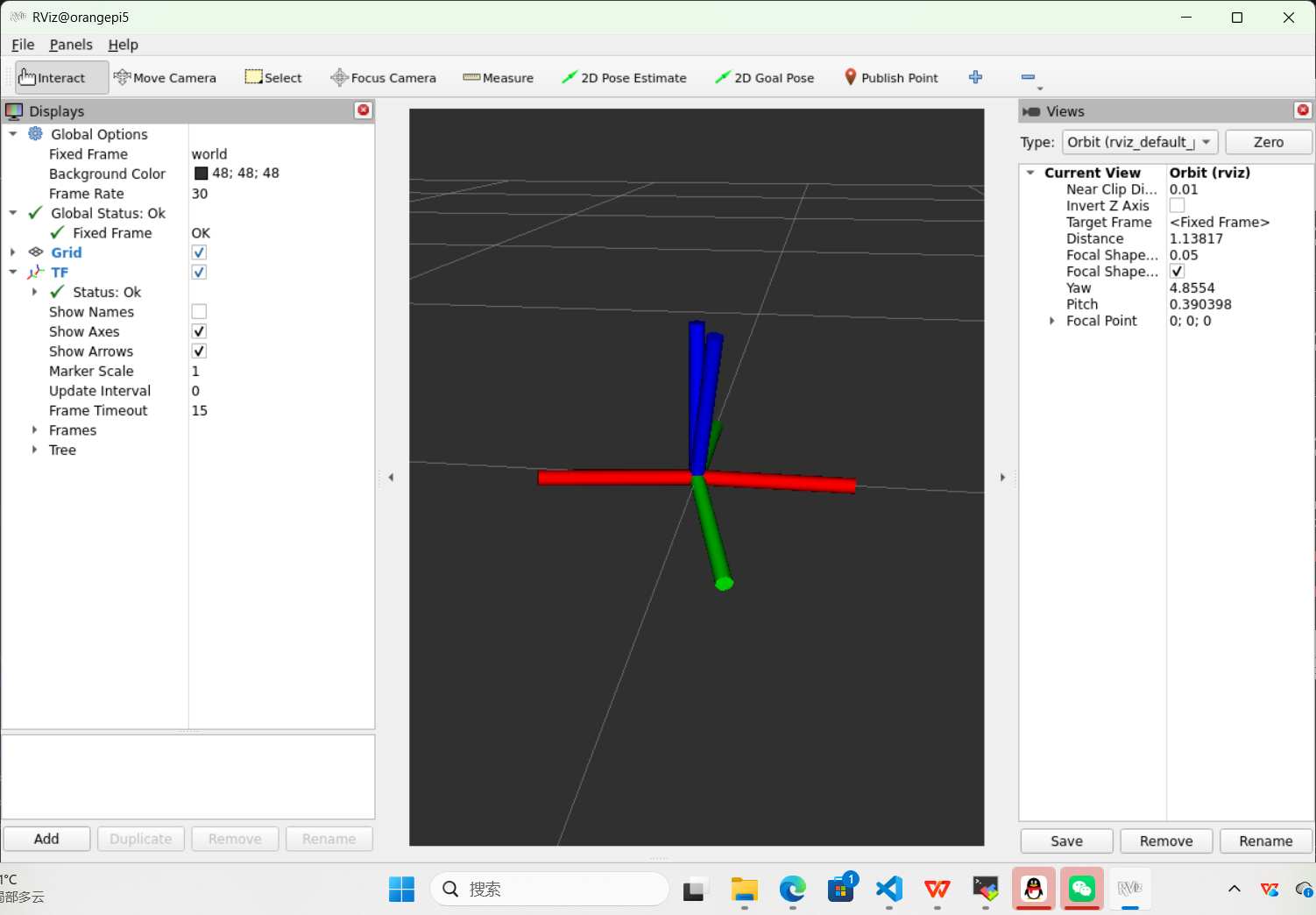 但是rviz2好像有局限,显示只能到30帧
但是rviz2好像有局限,显示只能到30帧
校准
def _handle_calibrate(self, request, response):
with self._lock:
if self._latest_q is None:
response.success = False
response.message = 'No IMU data yet'
return response
# 记录当前四元数并计算逆用于后续补偿
self._calib_q = tuple(self._latest_q)
self._calib_q_inv = self._quat_inverse(self._calib_q)
def _quat_inverse(self, q):
x, y, z, w = q
norm_sq = x*x + y*y + z*z + w*w
if norm_sq == 0:
return (0.0, 0.0, 0.0, 1.0)
return (-x / norm_sq, -y / norm_sq, -z / norm_sq, w / norm_sq)
手动记录此时的4元数数据,并把之后的4元数与之计算即可实现校准
ros2 service call /exo/imu/calibrate std_srvs/srv/Trigger "{}"
地平线模拟
拿过来画好的地hud代码,我订阅校准后的4元数,即可进行模拟
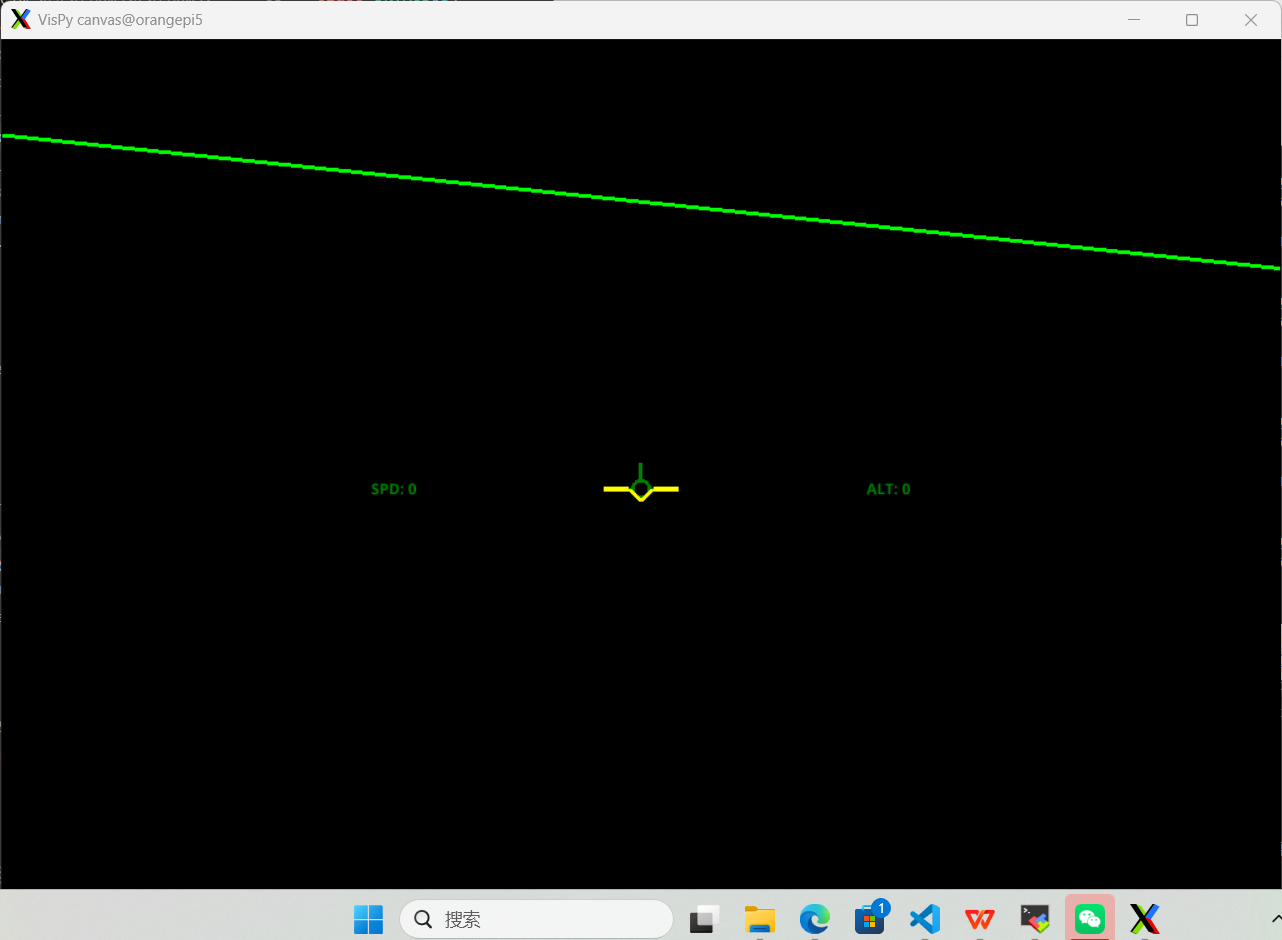 但是模拟的帧率也到不了120,查看数据频率没有问题
但是模拟的帧率也到不了120,查看数据频率没有问题
本文章使用limfx的vscode插件快速发布