3个传感器集成并进行综合实验
硬件集成
板子在使用vispy时会很热,所以热熔胶会软化,先拿胶带简单固定一下
imu
地平线和pitch ladder模拟良好,又加上了俯仰90度pitch ladder消失,以及超过90的视角跟随机制
if 80 <= abs_p <= 100:
self.ladder_node.visible = False
else:
self.ladder_node.visible = True
# 倒飞逻辑:当俯仰超过 90 度或根据你的传感器定义翻转
if abs_p > 90:
m_ladder.rotate(180, (0, 0, 1))
因为imu是贴着屏幕安装,屏幕要与地平线进行真实对比,所以imu的欧拉角与硬件应用的欧拉角对应关系有所不同,又因为imu某些角度会受地磁的影响,可能是这个原因导致导致我模拟的水平线的偏航角出现了偏移,暂时没有找到解决办法。
gps和气压计
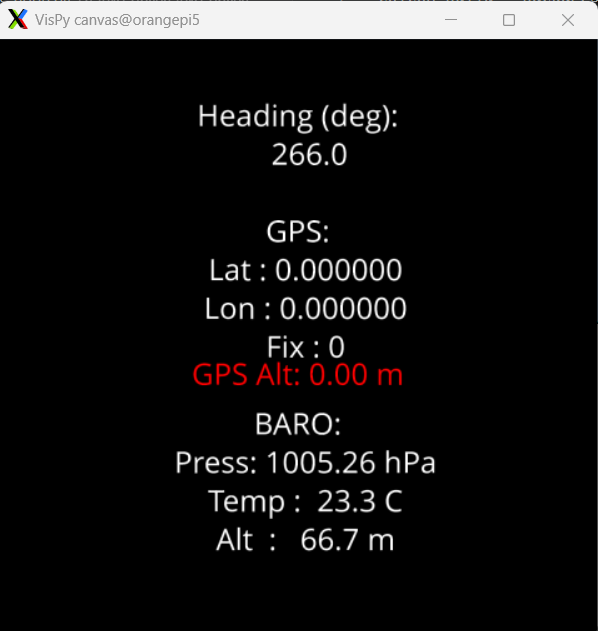 gps检测了经纬度和高度,气压计检测了压强、温度和高度,经纬度、气压和温度没有问题,首先gps的高度固定比气压计的高,也会有一定波动,稳定下来固定高30米。其次,也可能是天气原因,高度的数据与其它数据来源相差很大,也不好说有没有问题。
gps检测了经纬度和高度,气压计检测了压强、温度和高度,经纬度、气压和温度没有问题,首先gps的高度固定比气压计的高,也会有一定波动,稳定下来固定高30米。其次,也可能是天气原因,高度的数据与其它数据来源相差很大,也不好说有没有问题。
帧率问题
经过查找,是因为vispy运行时无法接入gpu,导致纯是cpu在跑,所以达不到120帧。尝试强制启用,没有成功,ai说可能是ssh远程操控的问题,但是我在屏幕上直接启用问题也没有解决,暂时不知道什么问题。
本文章使用limfx的vscode插件快速发布